日記代わりのまったりブログ。
PSO2はShip5にMILAIでよく現れる。 話しかけると中の人が反応するかも?『PHANTASY STAR ONLINE 2』公式サイト
http://pso2.jp
-------------------------------------------
https://new-gen.pso2.jp/
<お断り>
当ブログの記事は商用・非商用に関わらず引用および転載、URL貼り付け等を一切禁止させていただきます。


BED LEVELING用の3D Touchを静電容量型近接センサーへ変更 [Ender-3系]
まータイトル通り部品変えただけのお話ではありますが(ぇ
昨今の半導体事情とか見ていて、3Dプリンターのメイン基板とか乗り換えが必要になったら困るのでいろいろ調べたりしていて。
いつものTriangle Labの商品をメーカーページへ見に行ったときに気がつく。
「あれ?3D Touchの商品ページが消えている…?」
そうなんです。
直販側にも表示があったBL Touch互換品の3D Touchのページがいつの間にかないぞと。
(もしかしたら忘れてるだけで最初からないのかもしれないけど←)
AliExpressの直販ショップにはあるので手に入らないわけではないんですが、最近ちょっとこのBL Touch系の更新があんまりないなと言うこともあって、予備用意しておこうかと考えたわけです。
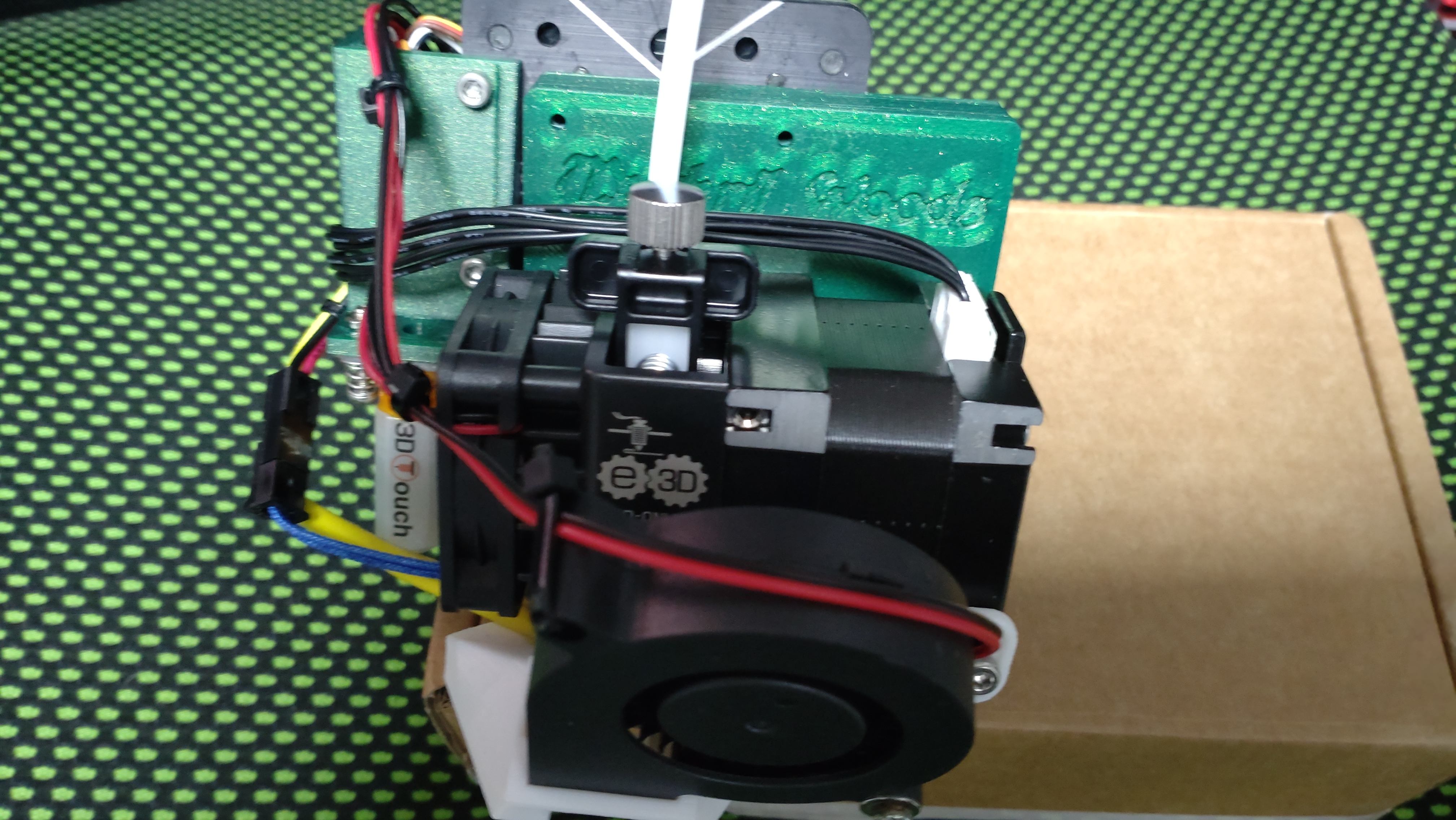
が…まだ完成というか最終調整で手こずってるパーツ集めて組み上げてる「クローンPrusa i3」を見ていてふと思ったのですな。
※Prusa i3のXY軸はリミットスイッチを使わず負荷を検知して0点取る方式、Z軸はP.I.N.D.Aという静電容量近接型センサーと温度センサーが一体になったものが使われています。
「P.I.N.D.A系の近接センサーの方が後々困らないのでは?」と。
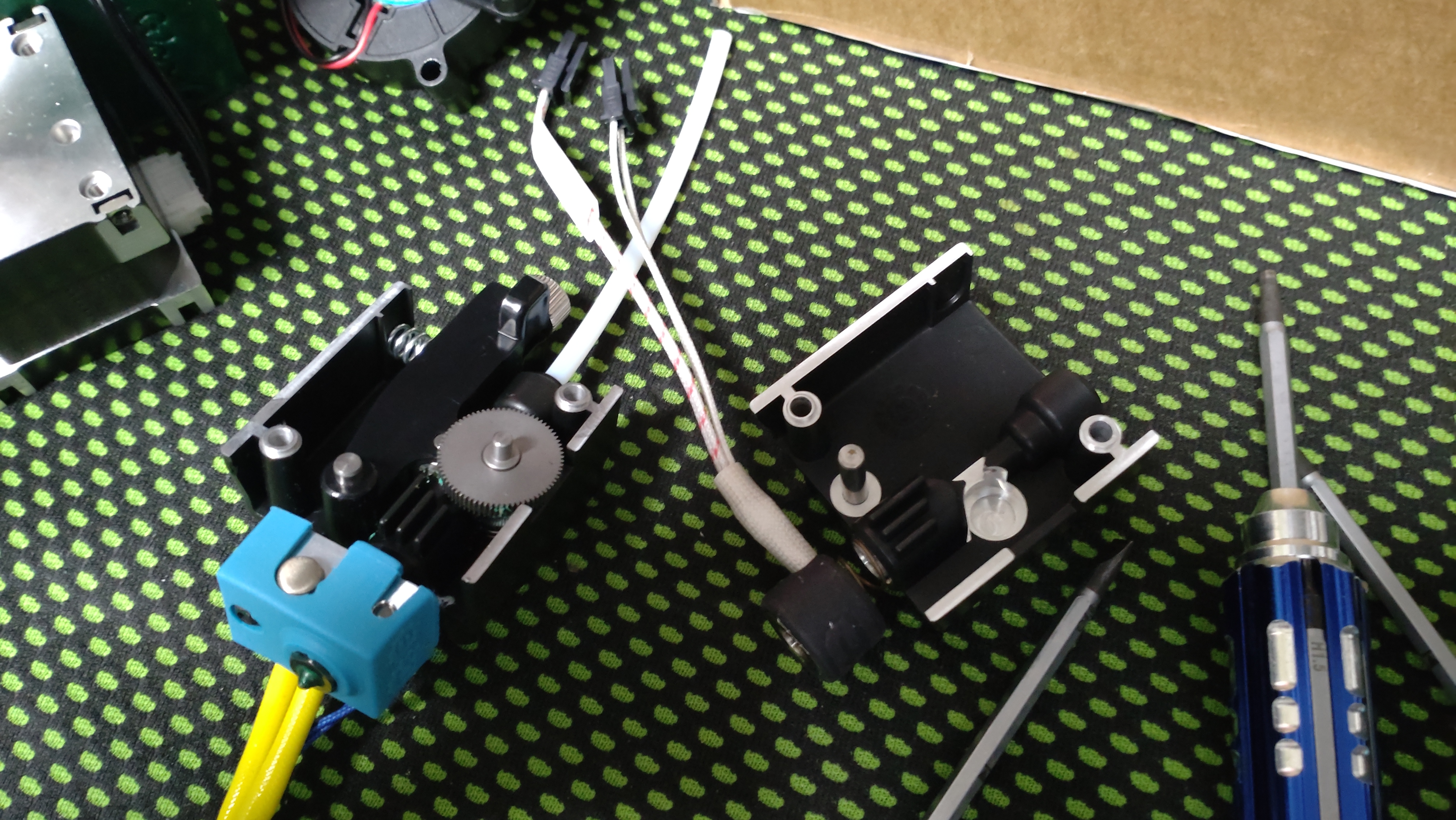
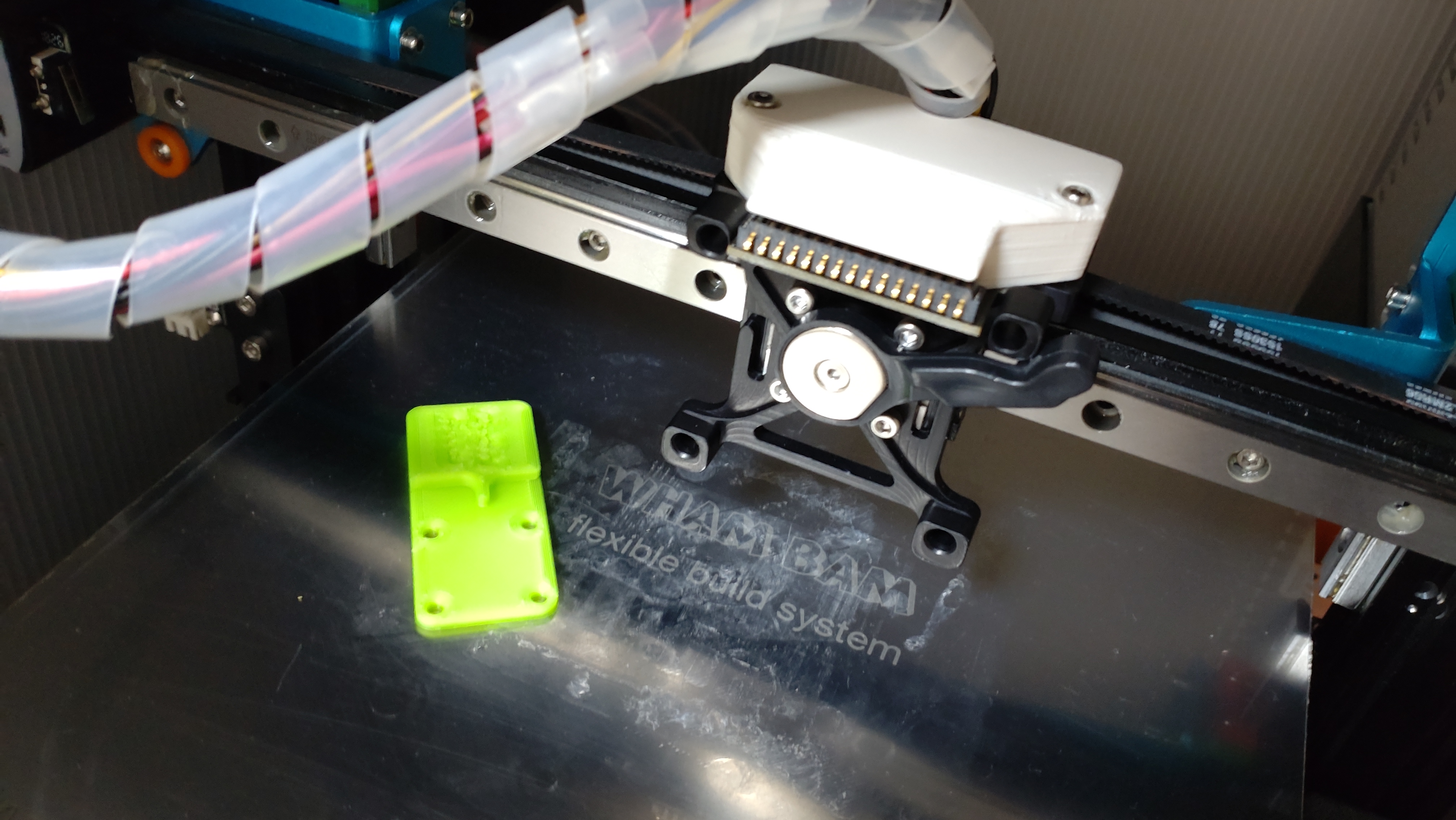
静電容量型近接センサーだとベッド側が金属じゃないと反応しない(表面が樹脂ベッドだと検知できない)ので、WHAM BAMみたいなスプリングスチールのビルドプレート必須になってしまいますが、
考えてみればもうそれ以外のビルドタック使わなくなってるので問題ないし、何しろBL Touchのようにプローブ破損交換も考えなくて良い、さらには配線がZ MIN使えば良いだけなので簡単かなと。
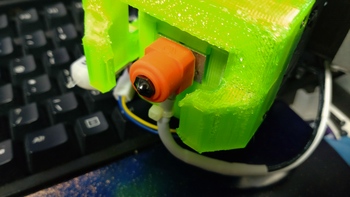
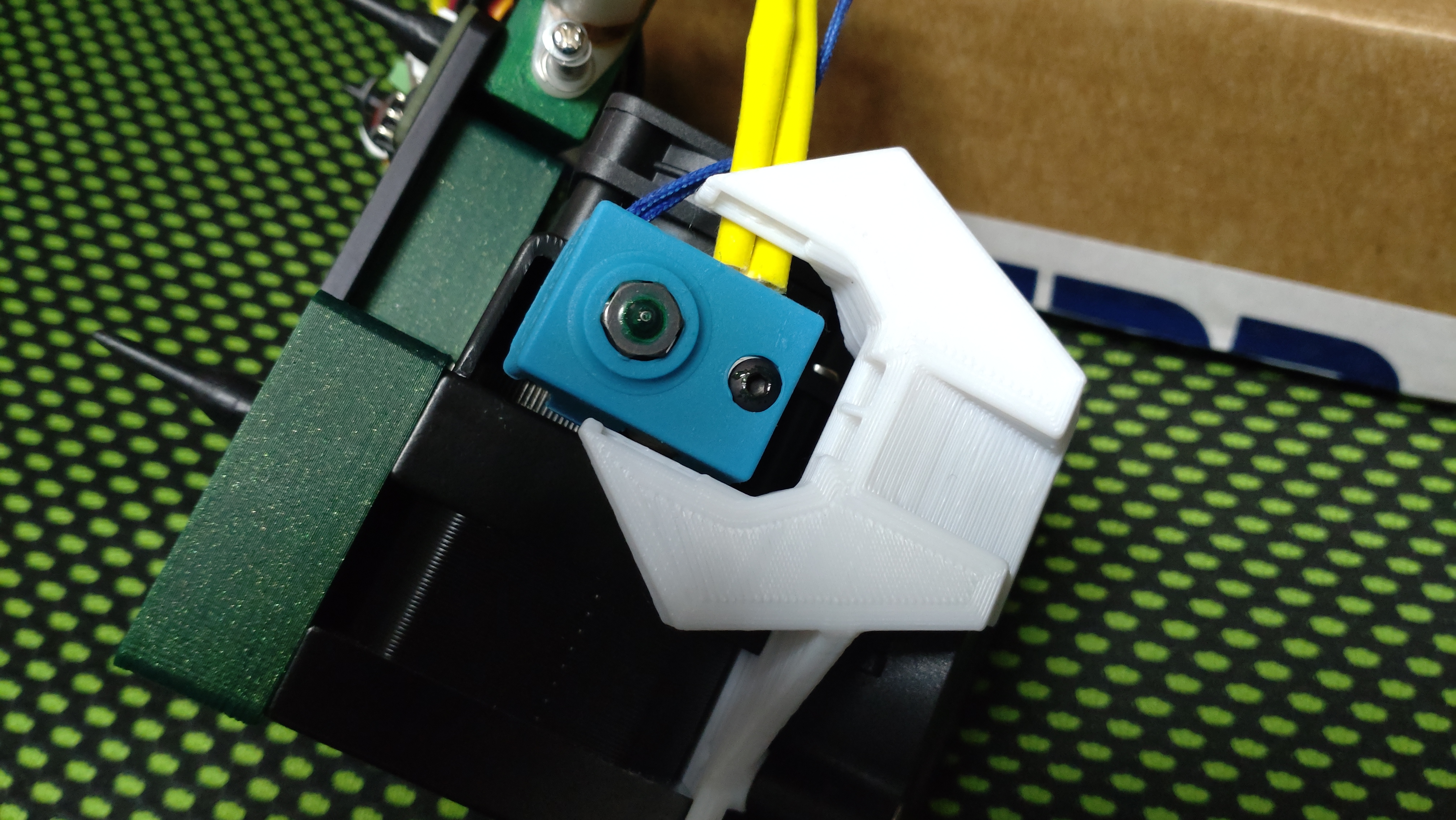
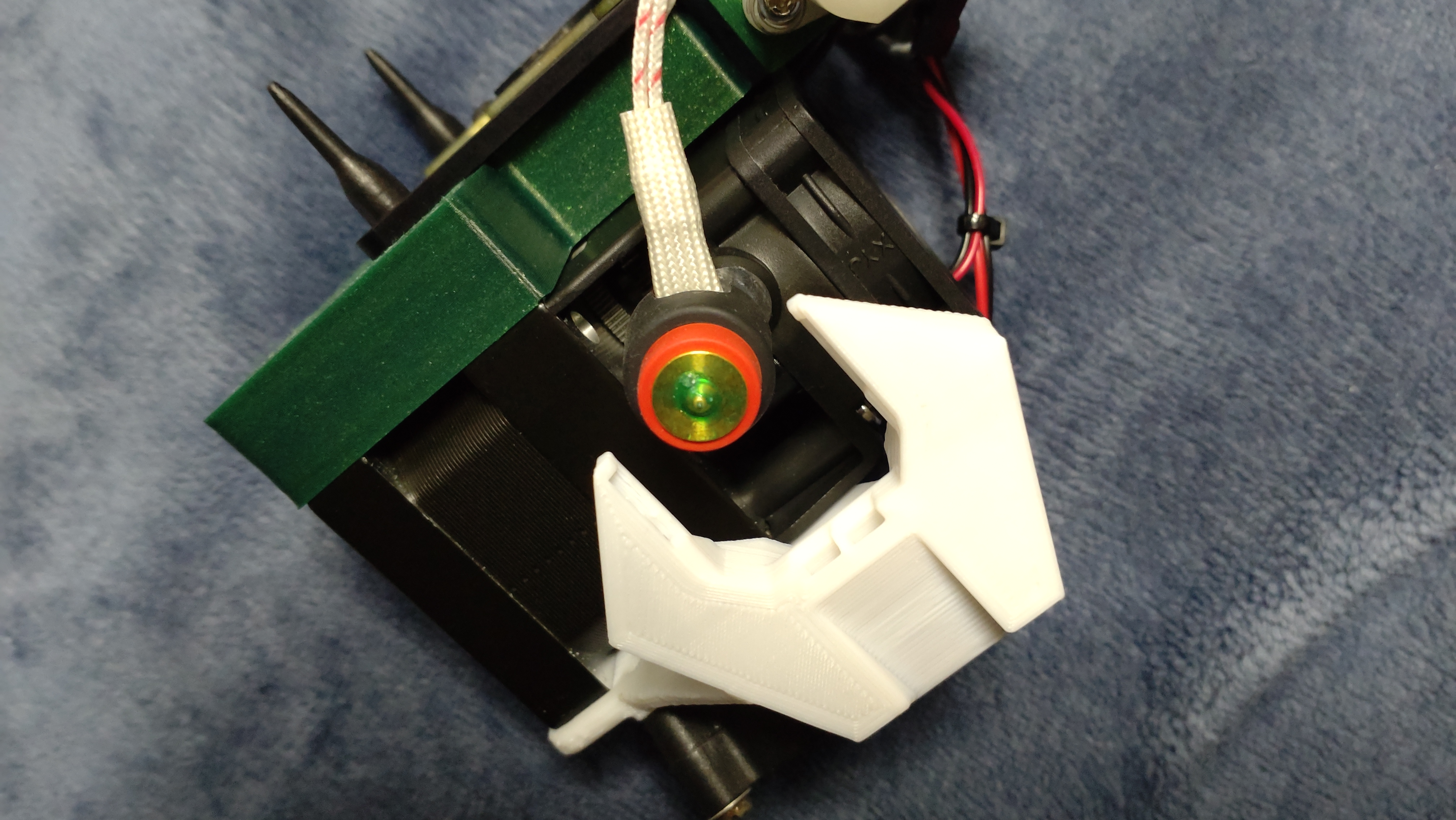
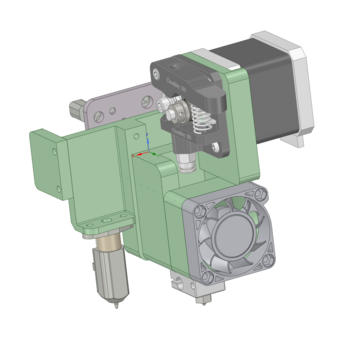
というわけで、Φ8mmの静電容量型近接センサーを必要分購入しました。
※できるだけ小型にしたかったのでTriangle Labが扱ってる商品を今回は選んでます。日本製でも5V動作のものなら大丈夫。
静電容量型近接センサー買うときに「ノーマルオープン」と「ノーマルクローズ」の2種類でどっち買えば良いか悩むかと思いますが、Prusa i3に使われている「P.I.N.D.Aはノーマルクローズ」と調べていたら出てきたので「ノーマルクローズ」を購入しています。
(理由はMarlinの設定ファイルでPrusa i3用の記述を参照して確認するためです。逆だとリミットスイッチの設定が逆になる可能性があるので。)
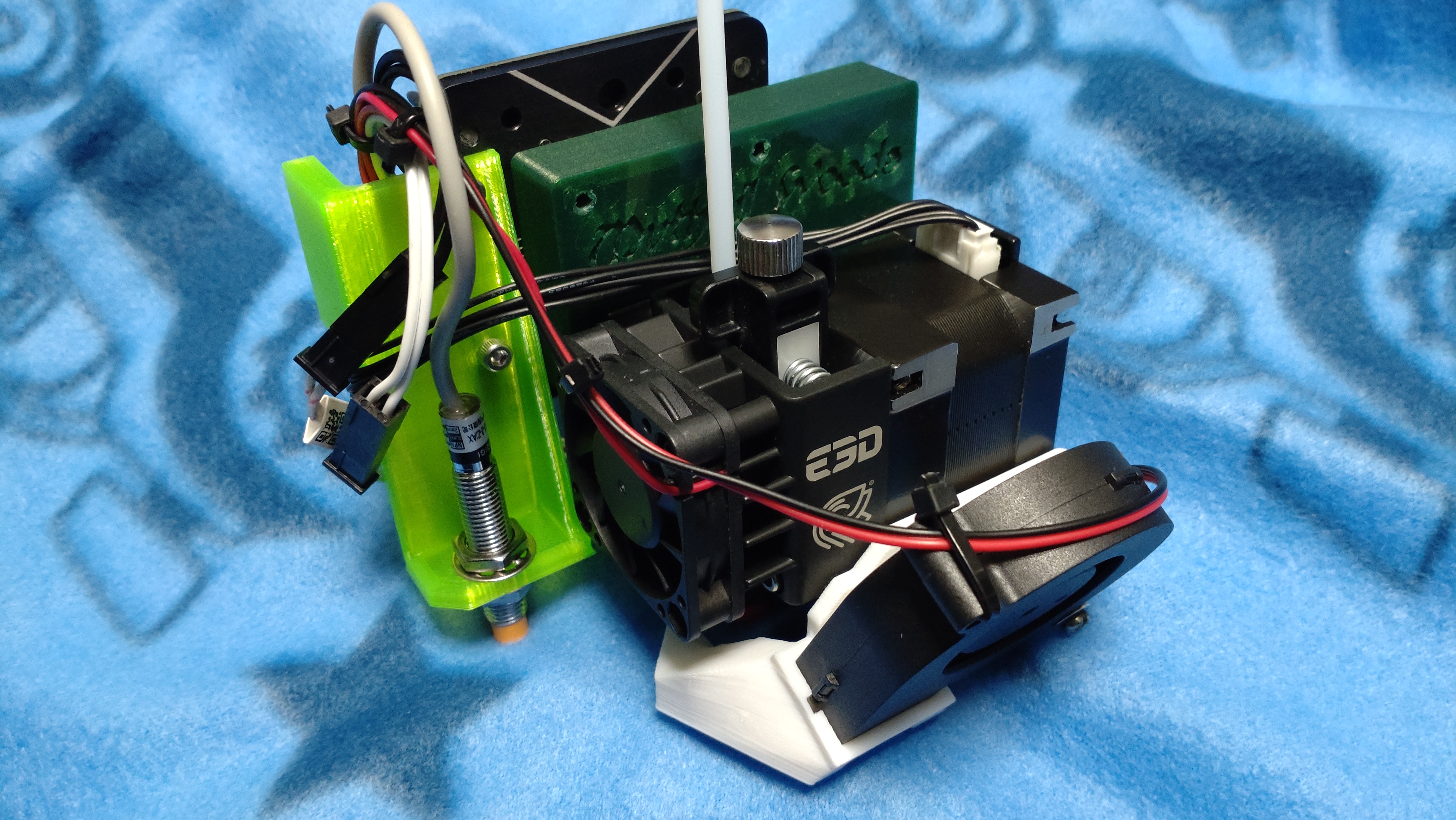
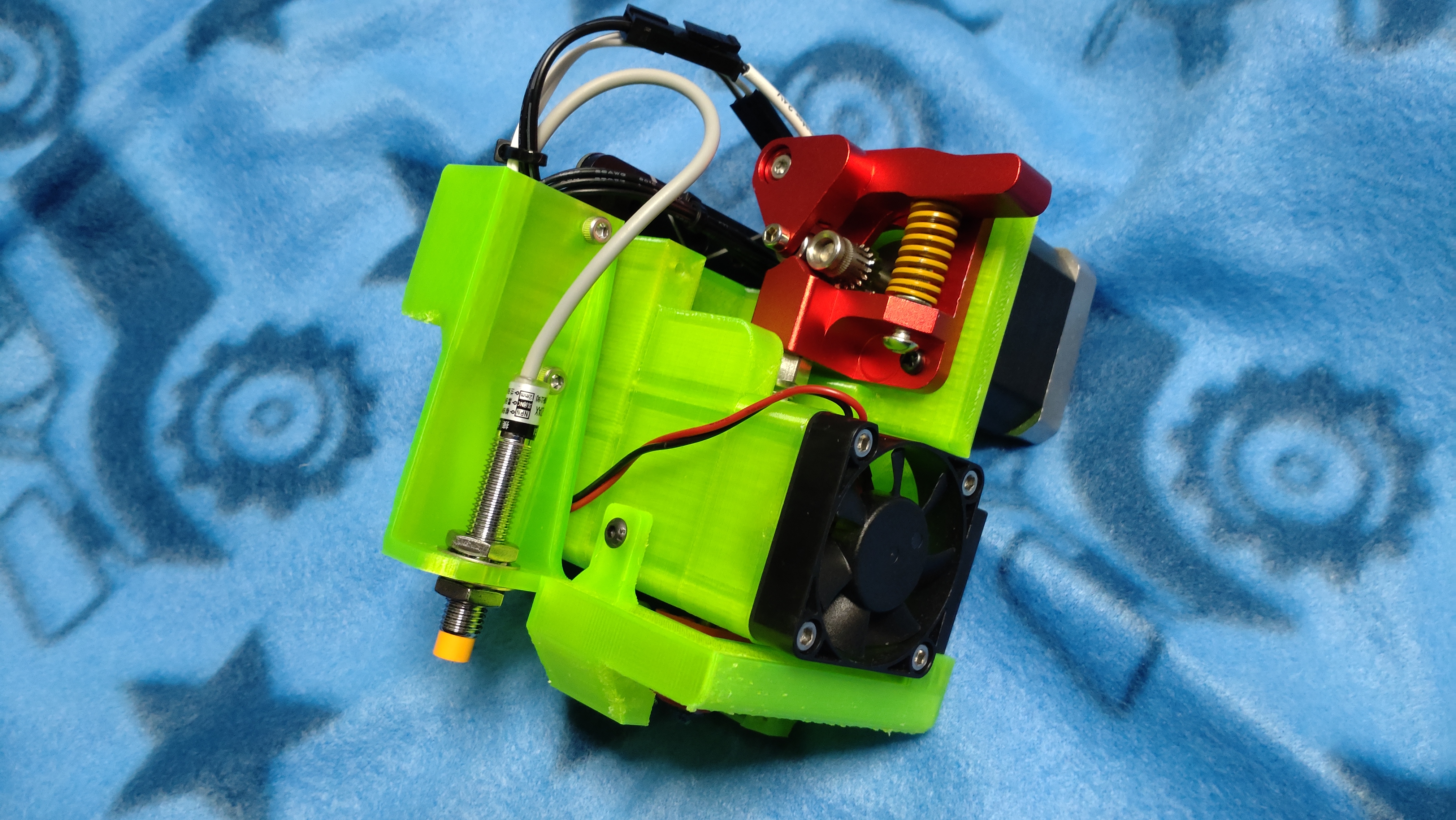
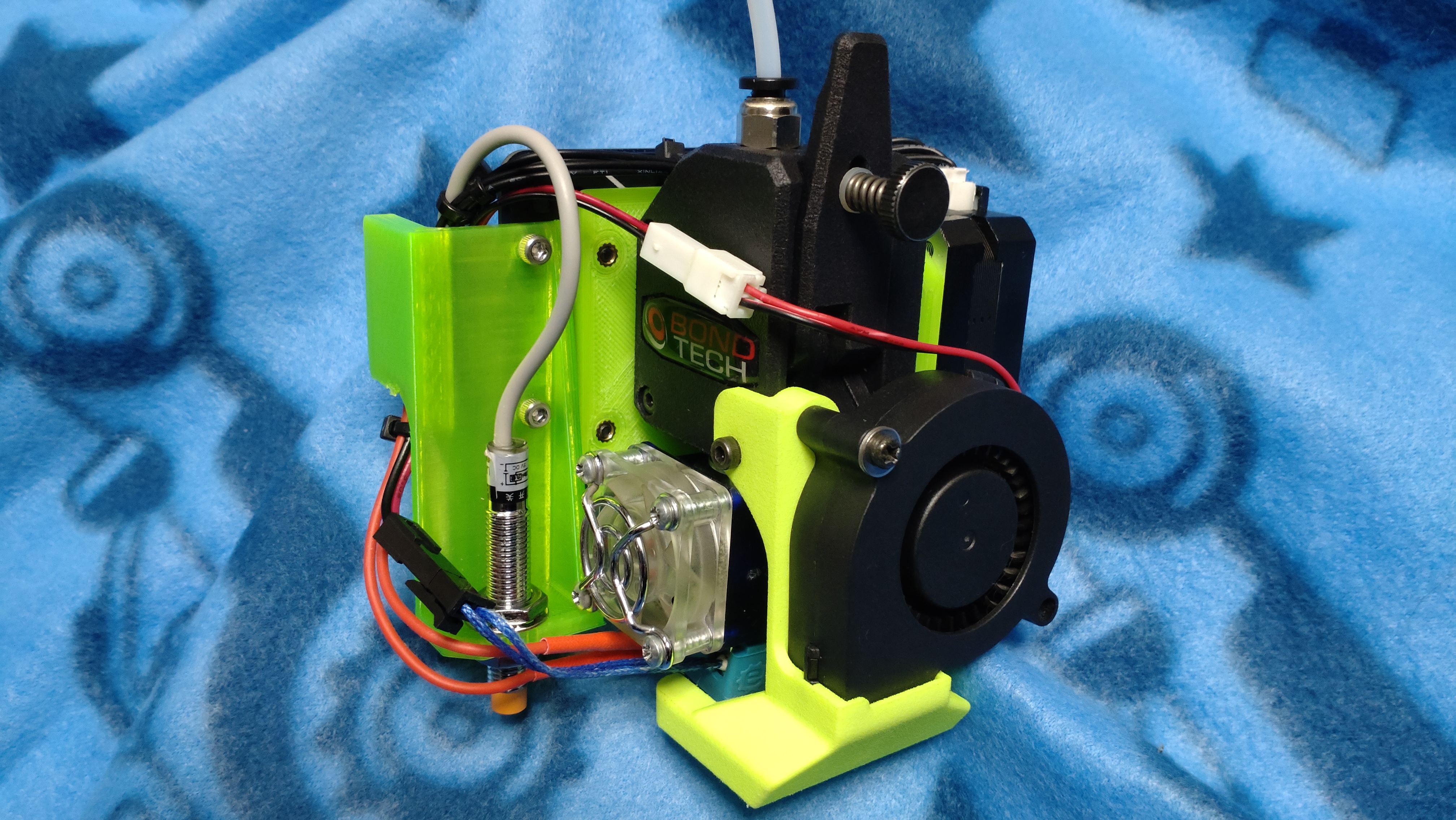
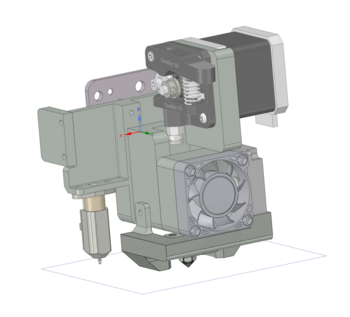
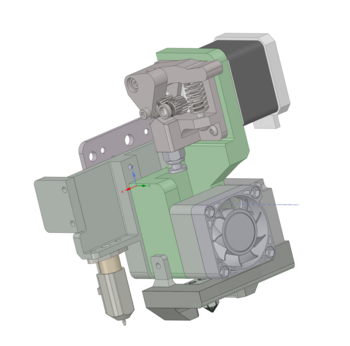
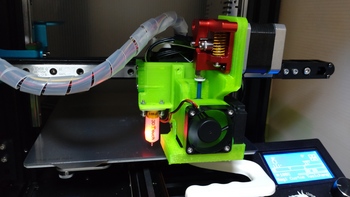
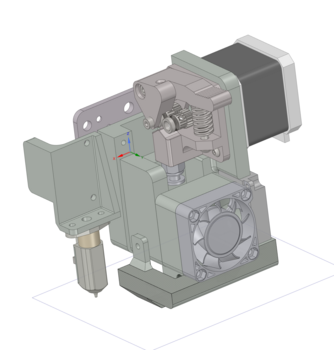
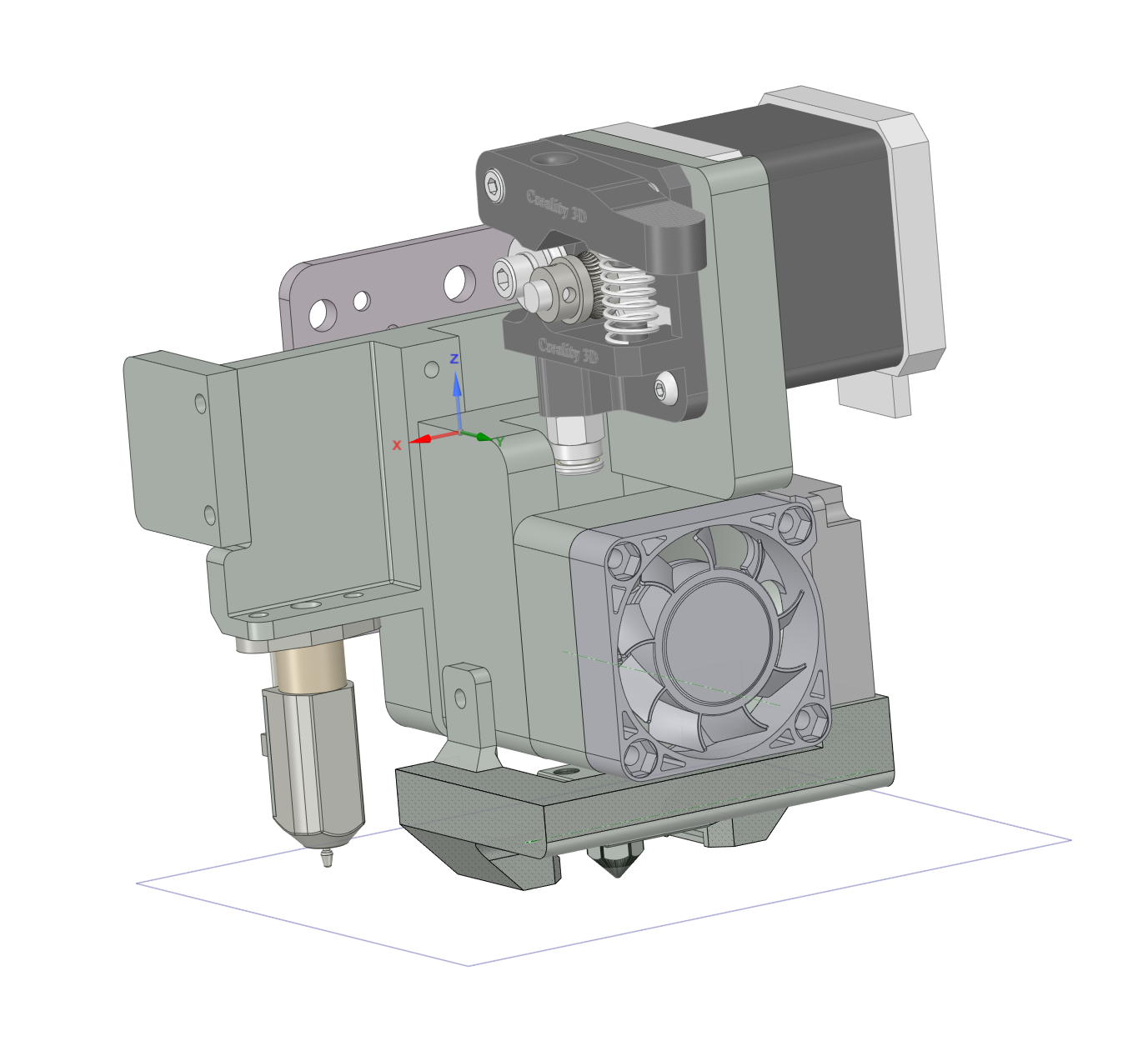
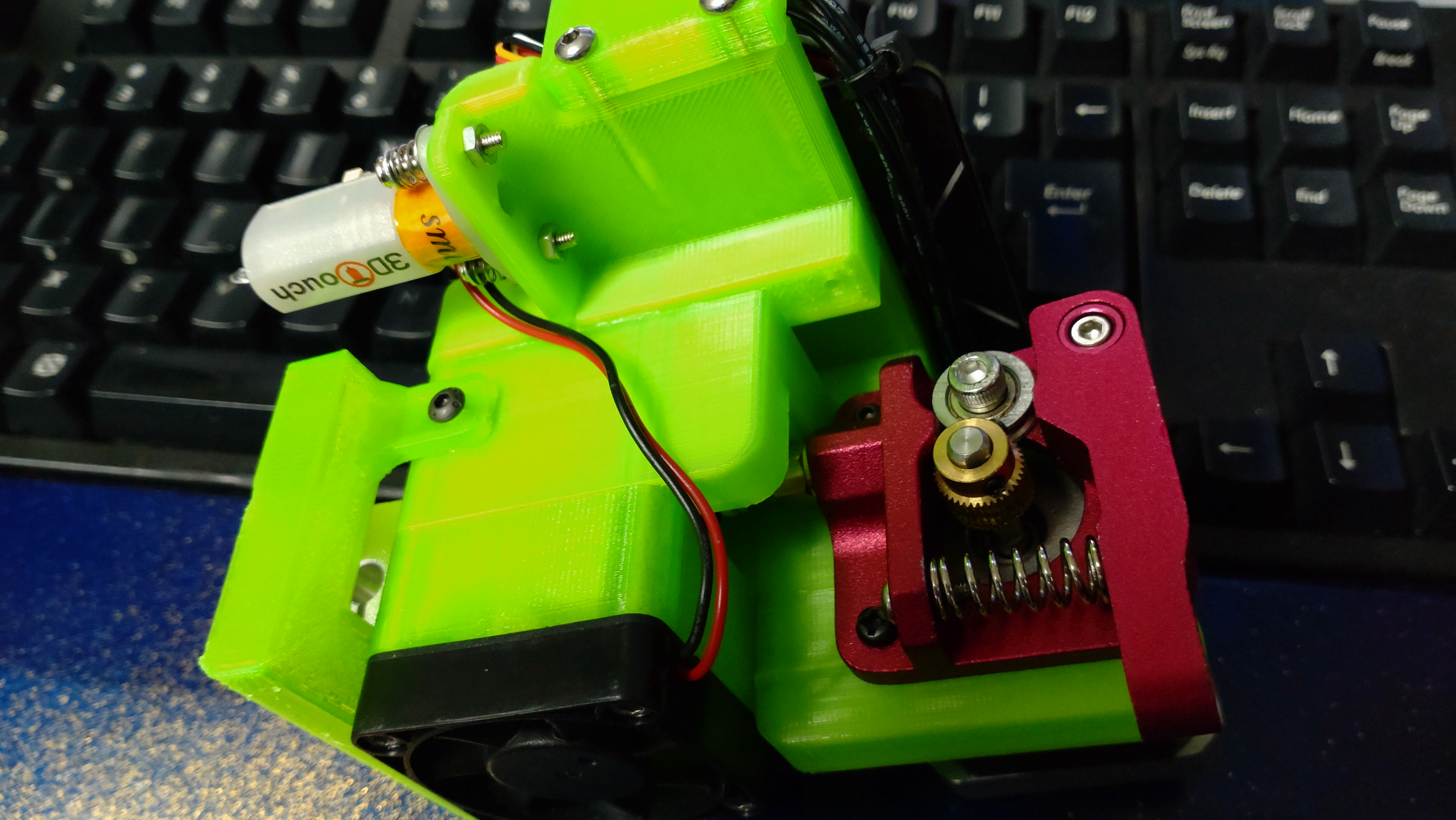
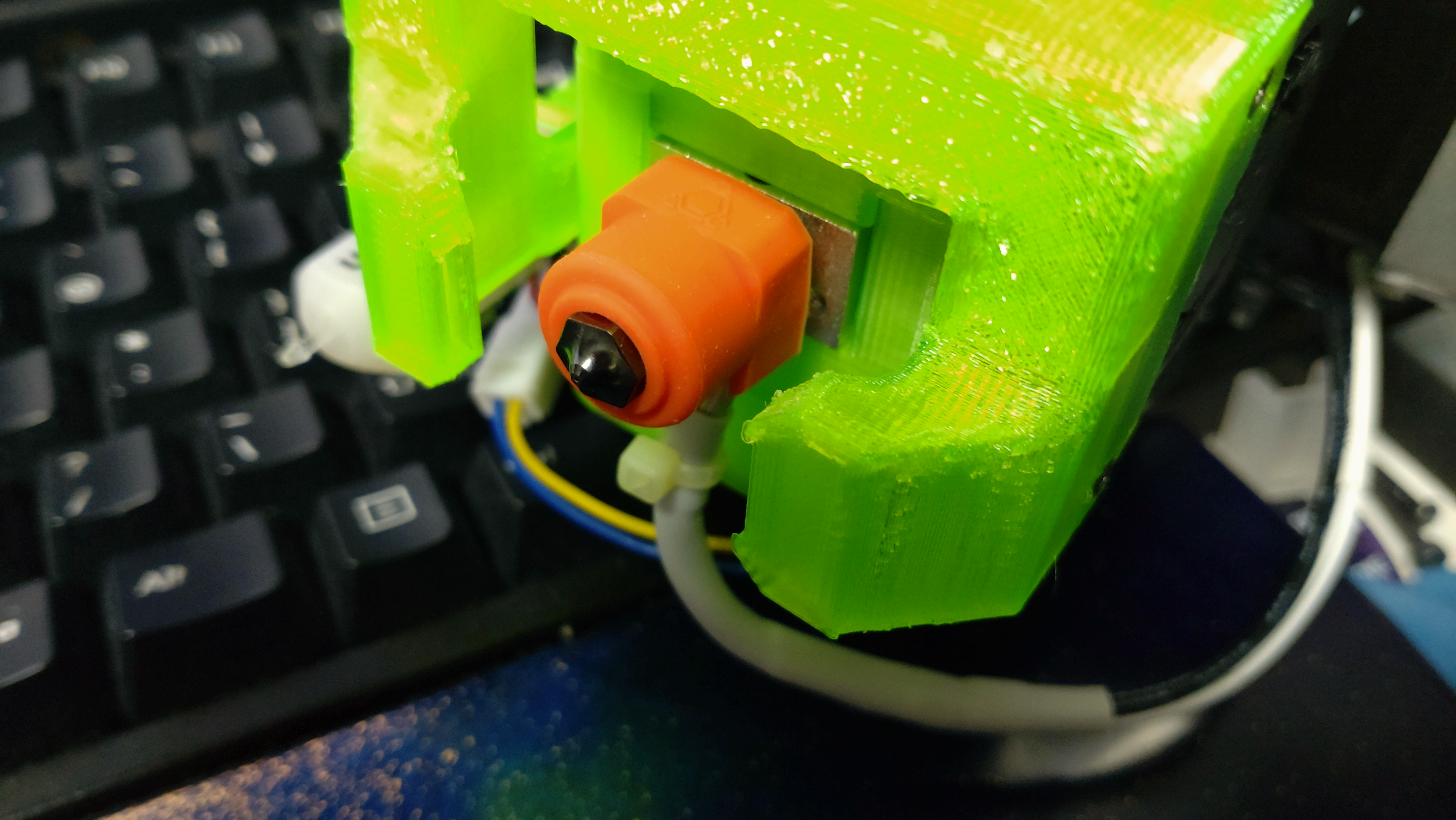
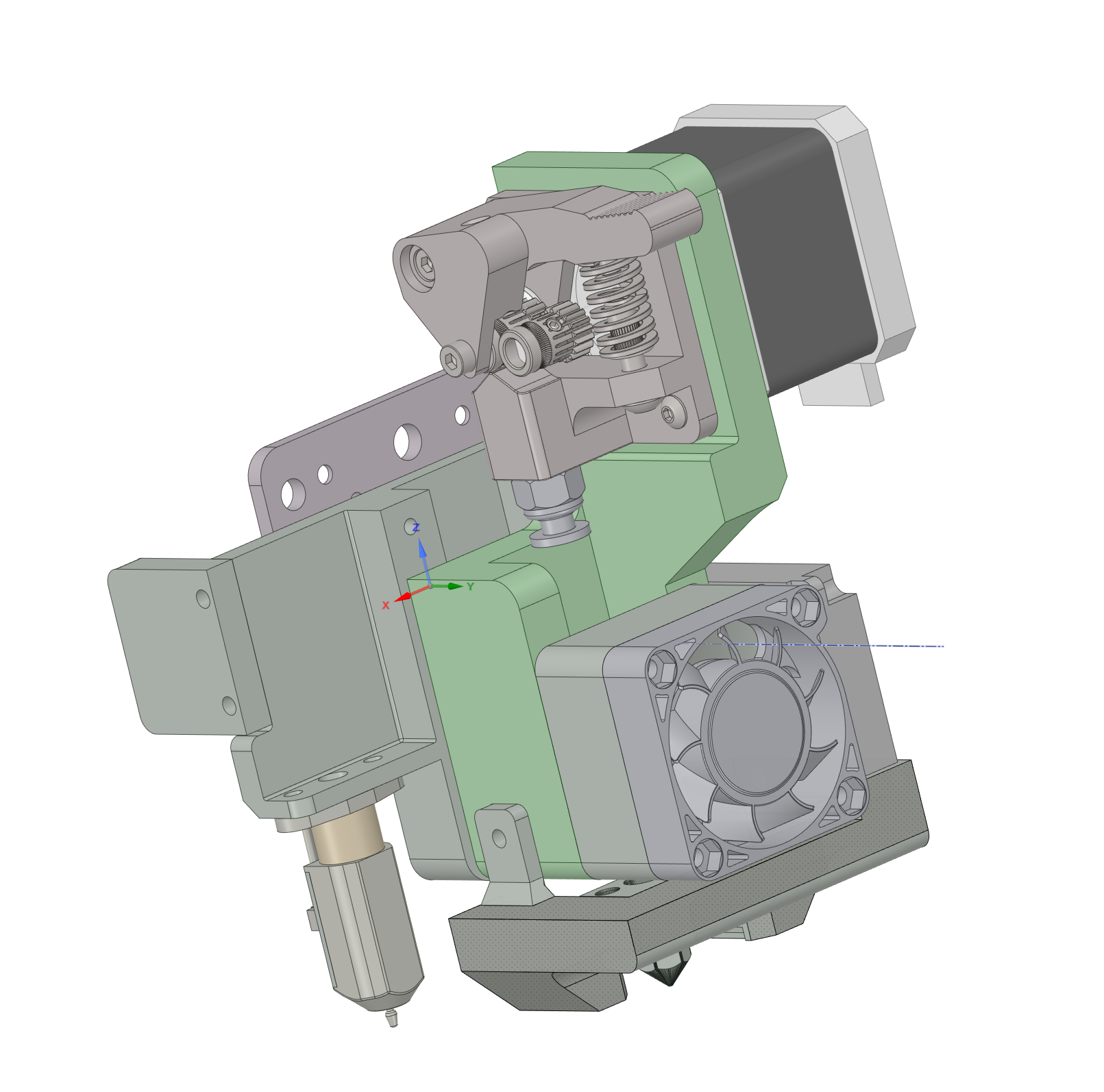
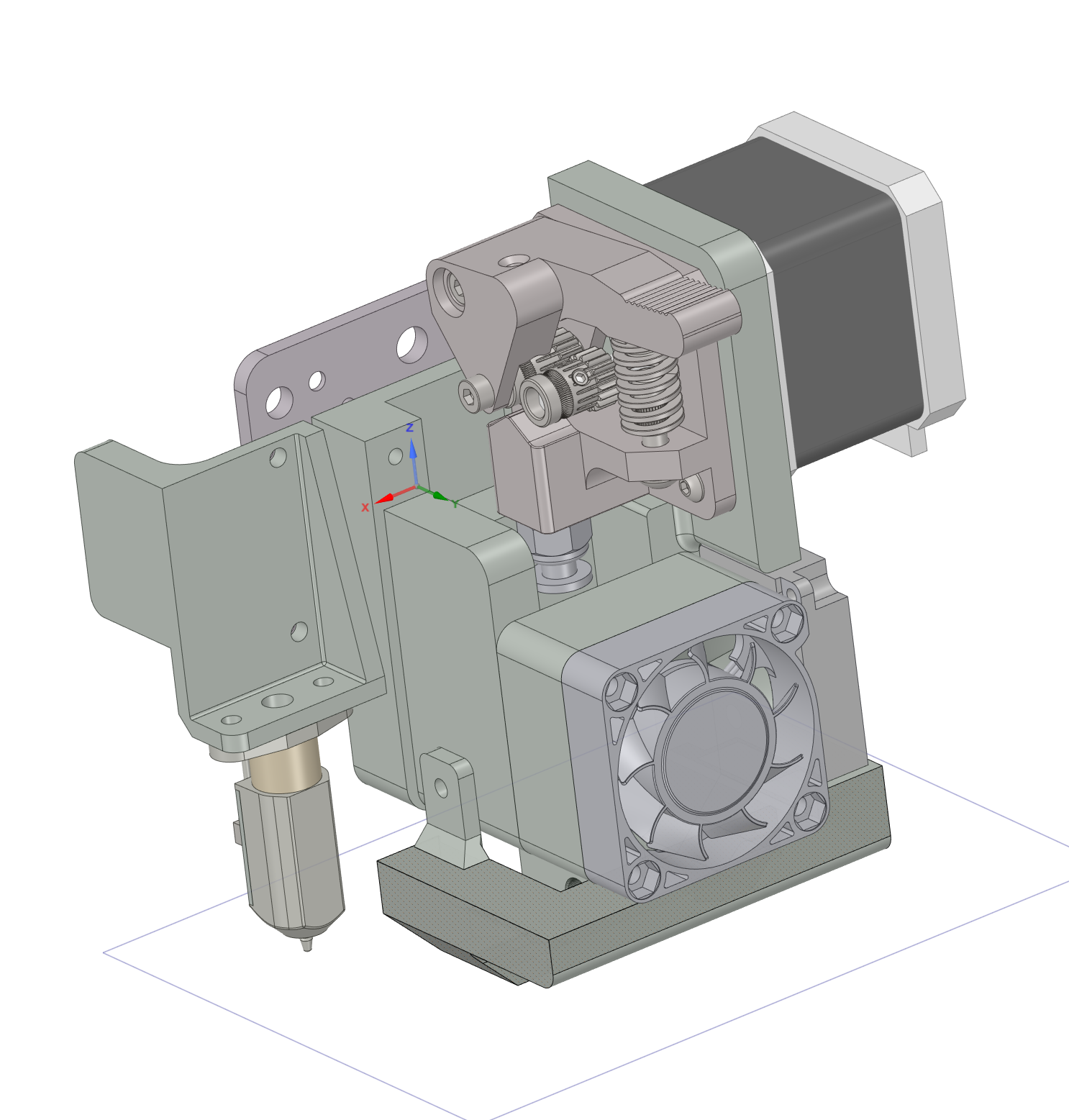
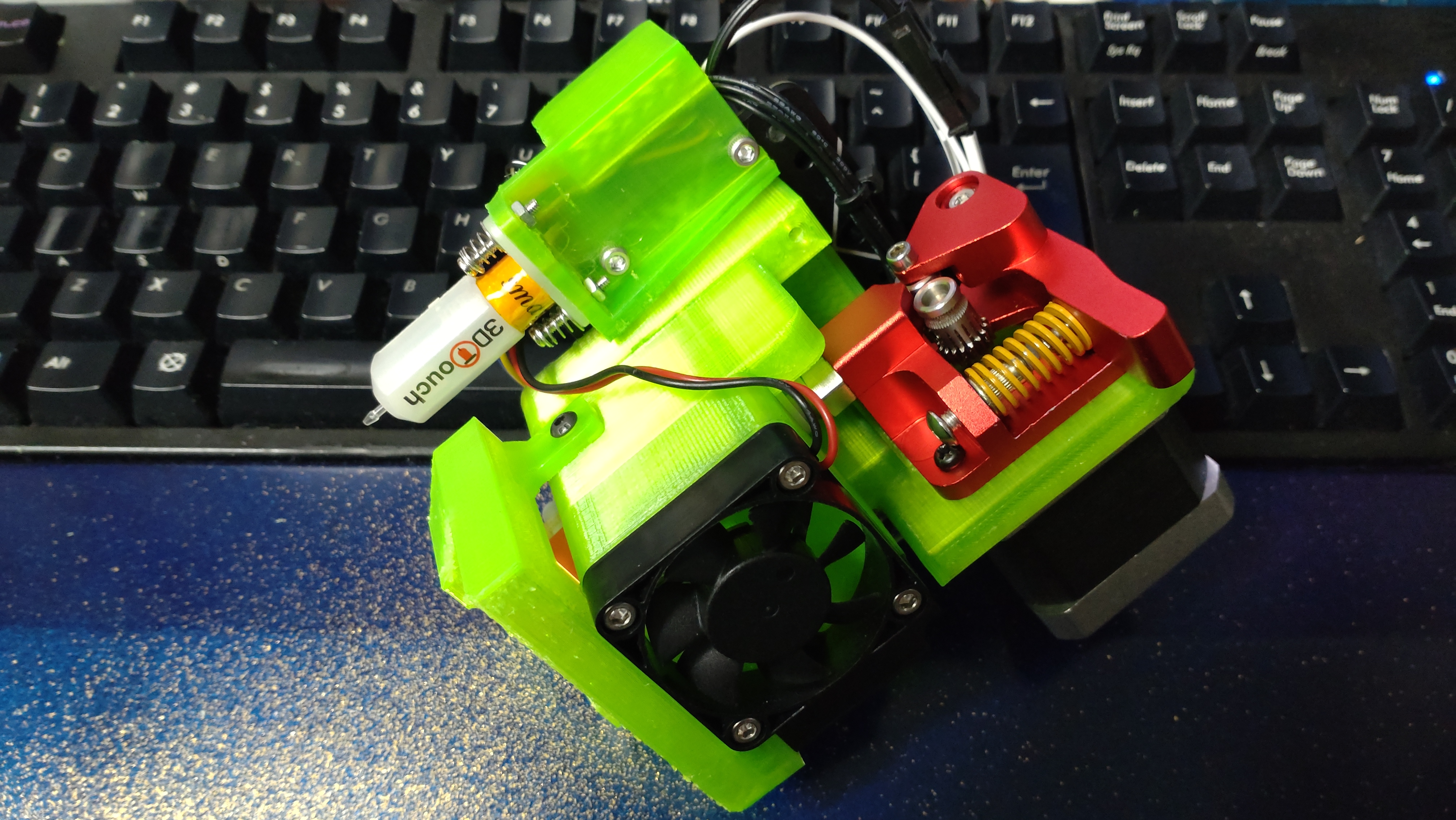
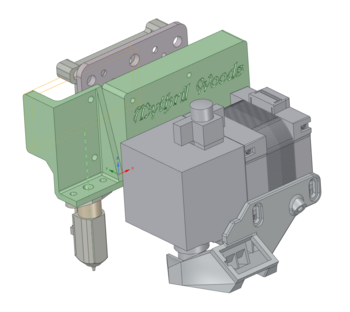
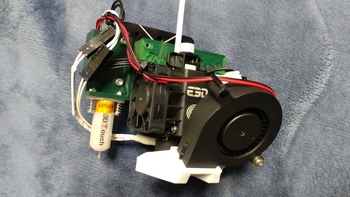
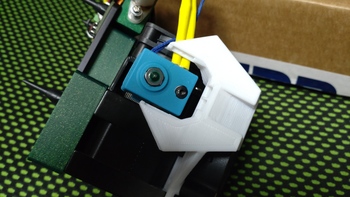
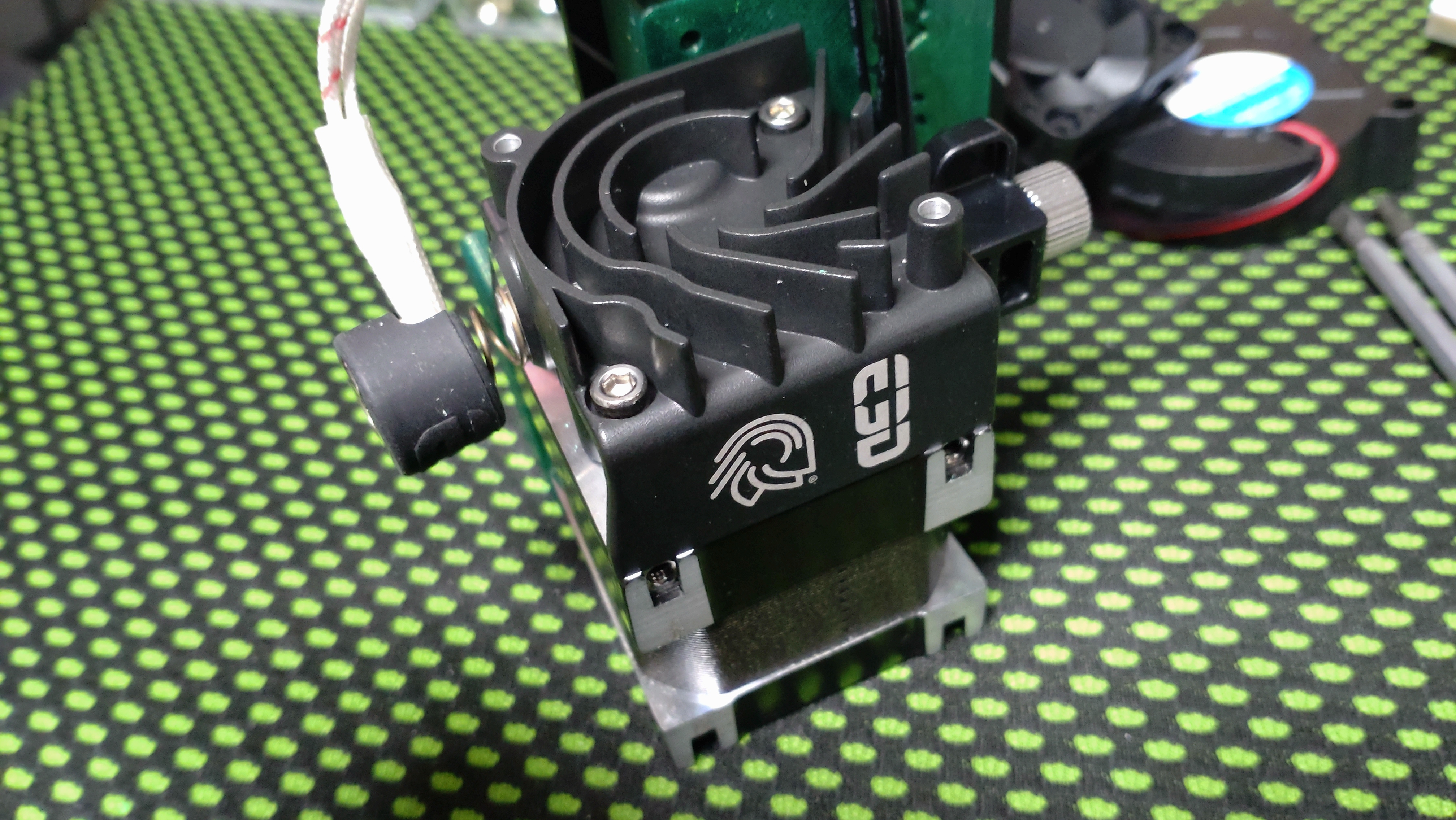
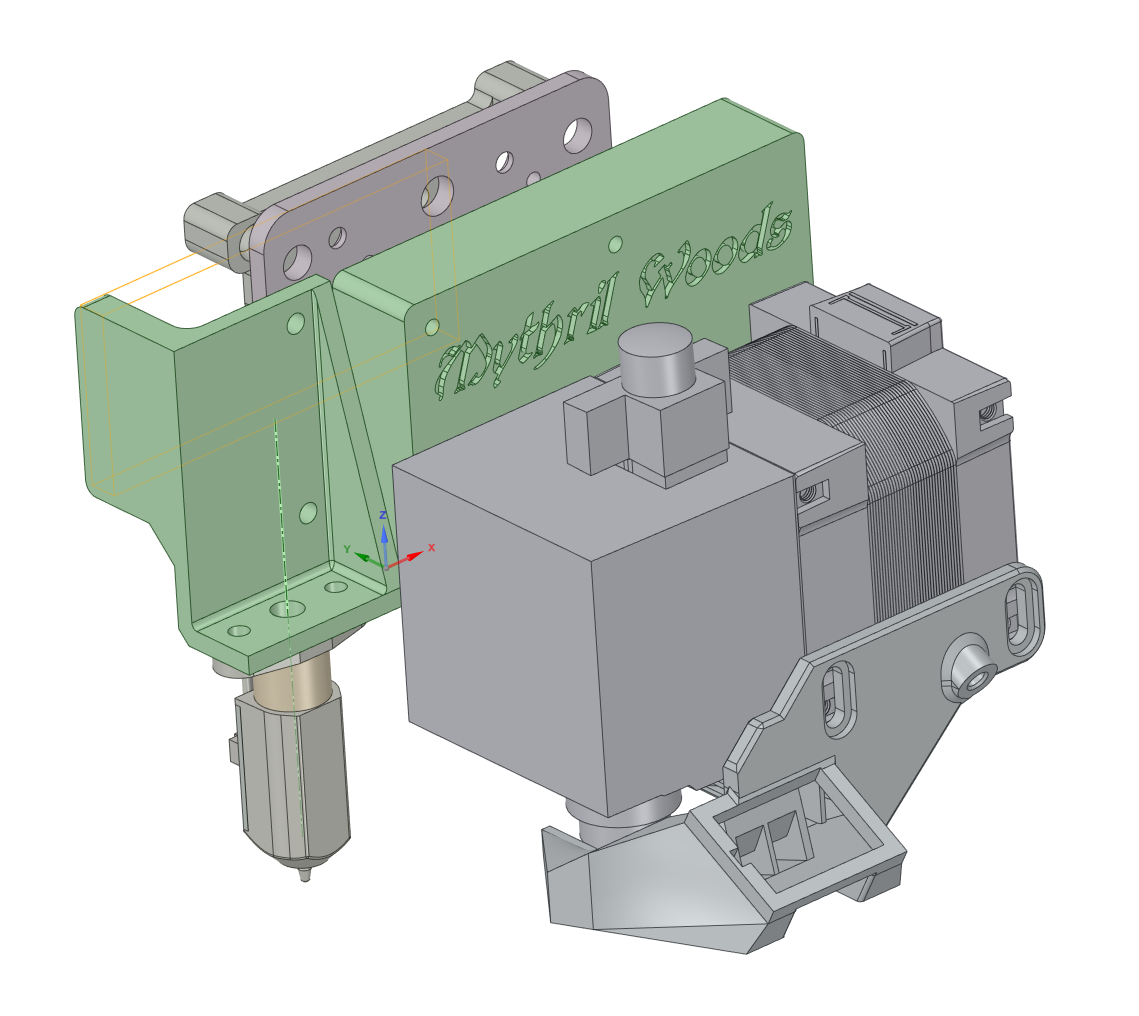
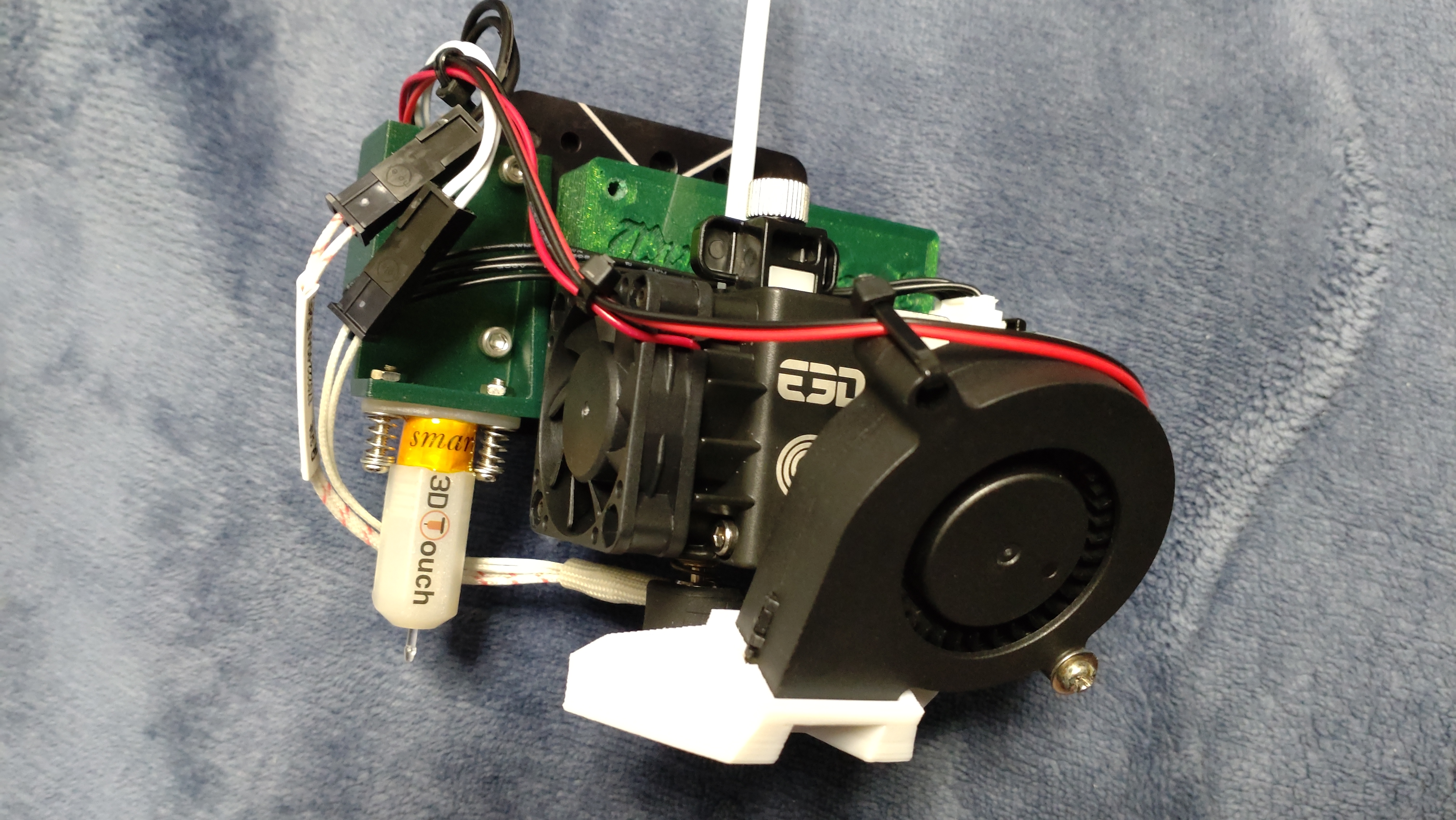
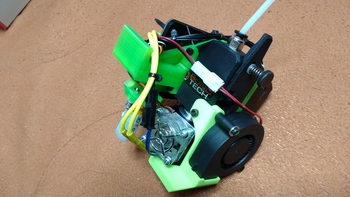
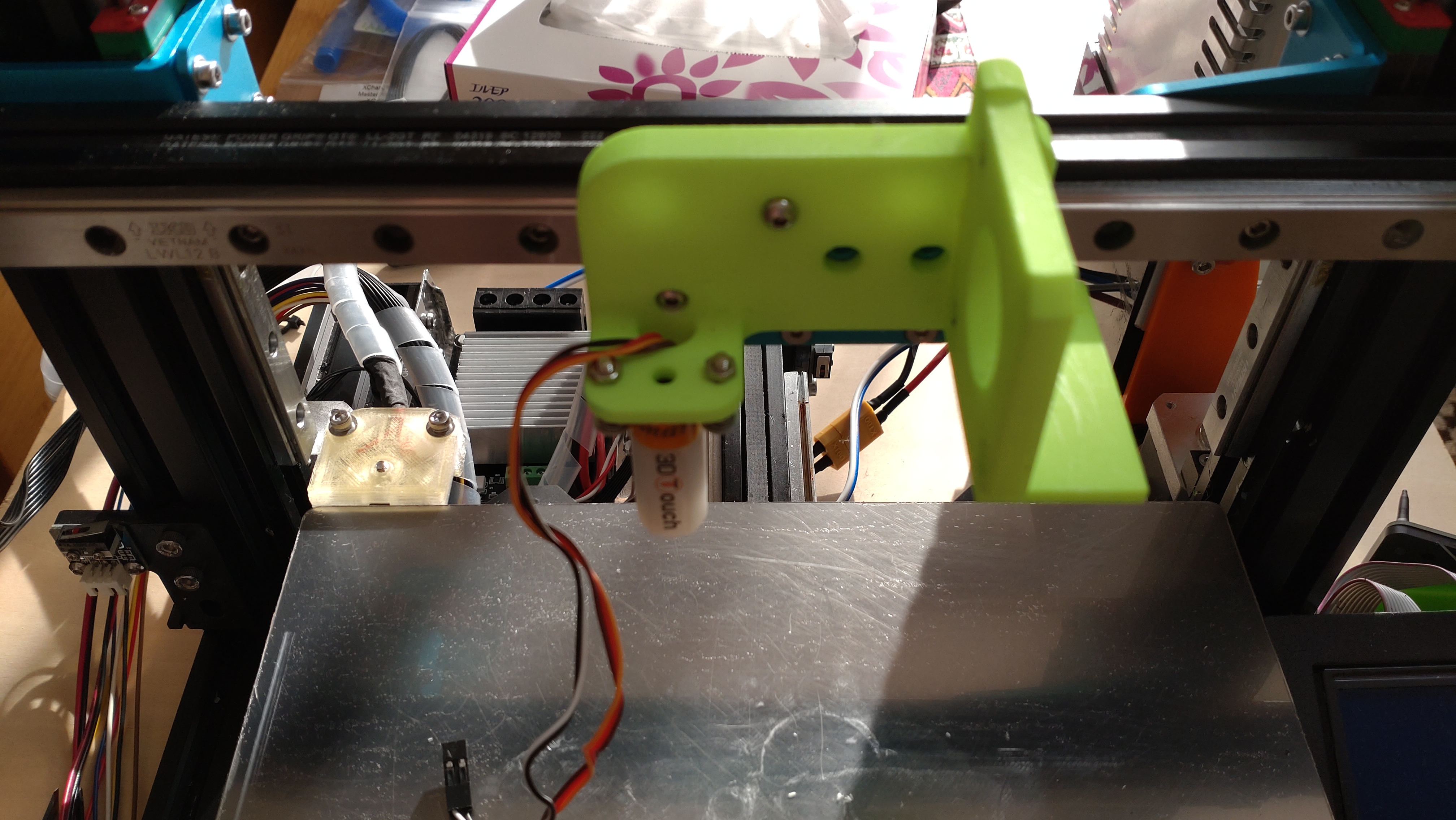
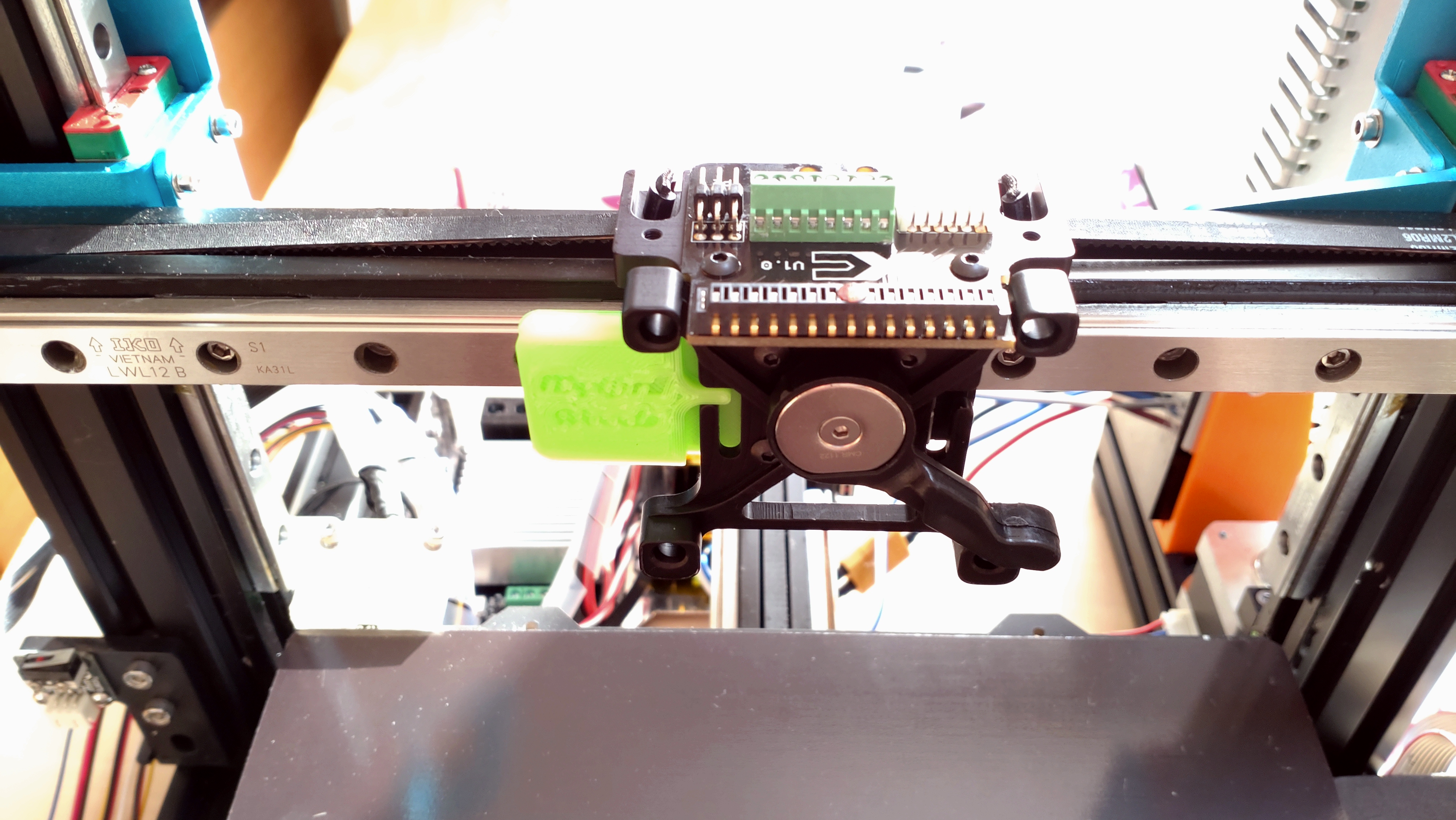
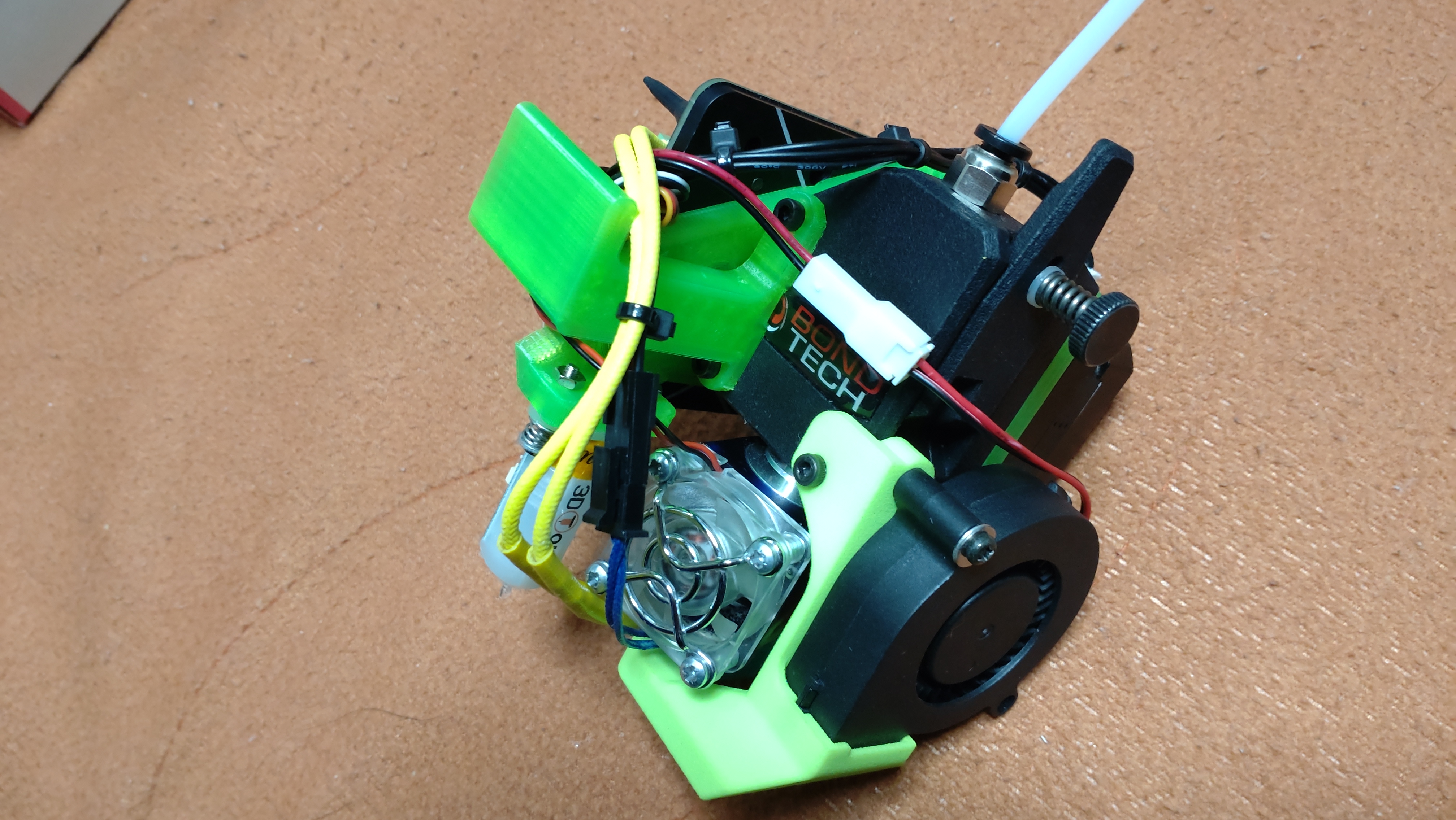
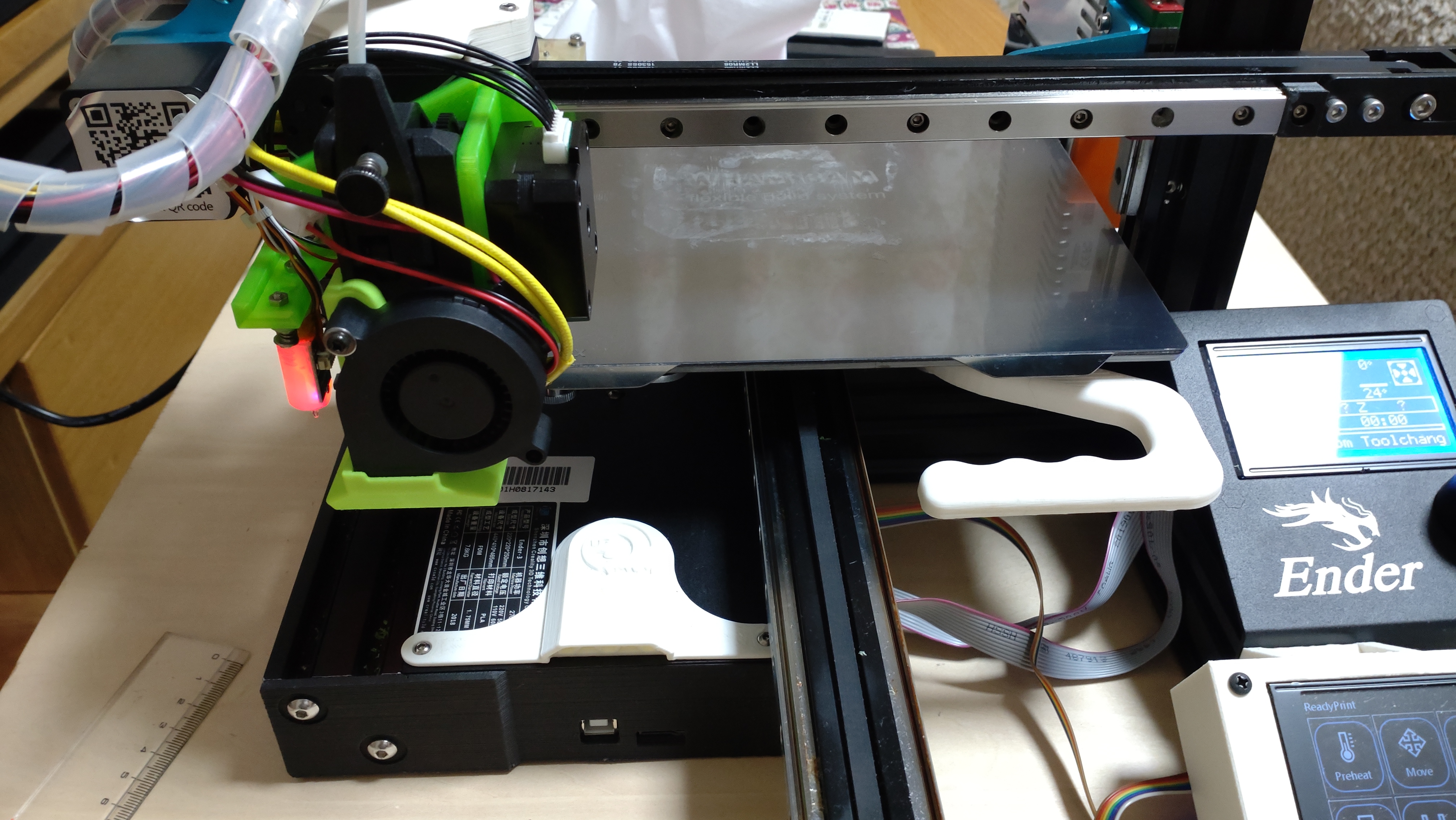
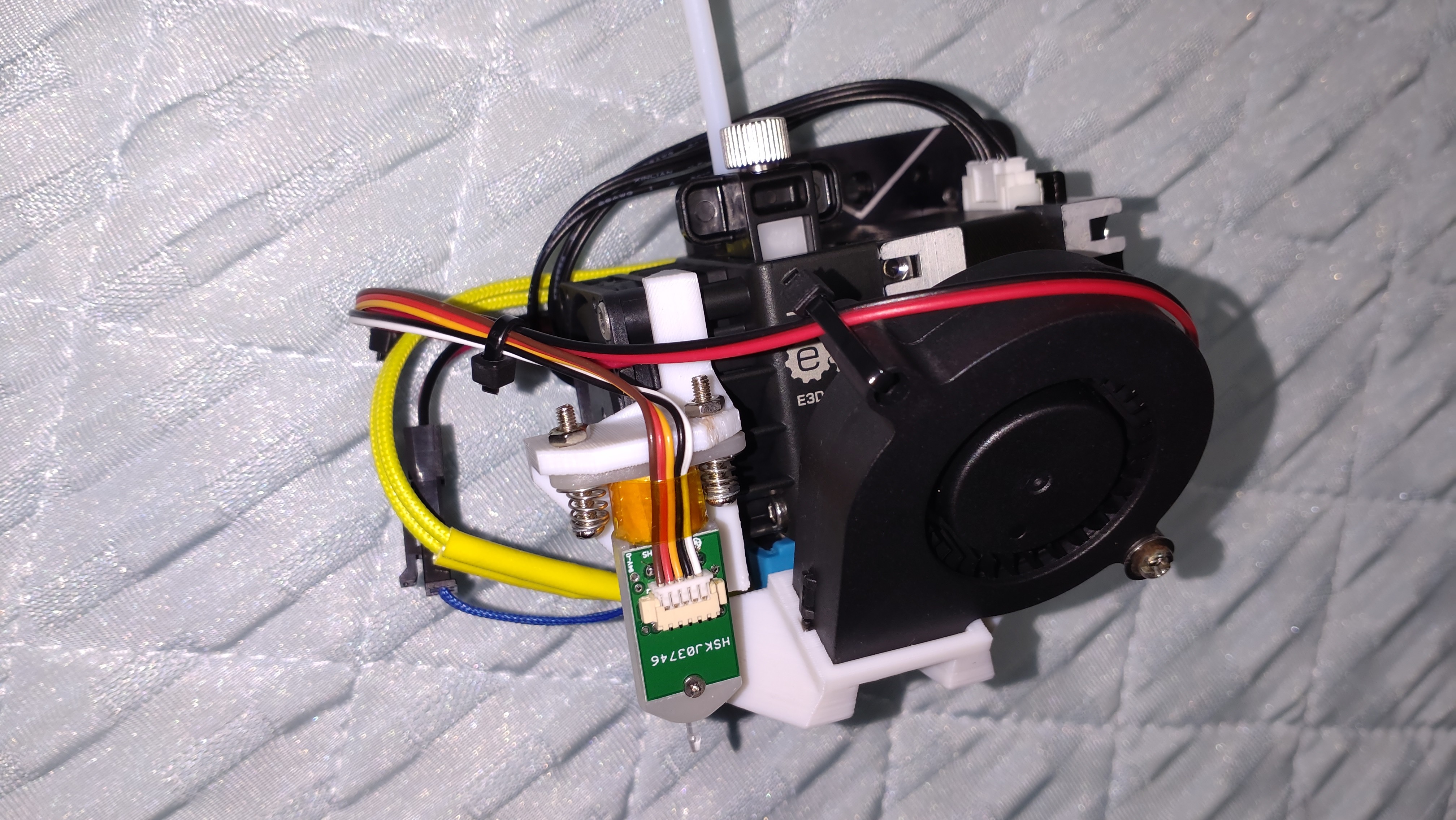
で、届くまでに取り付けブラケットの設計して出力しておき、届いた段階で組み付けました。
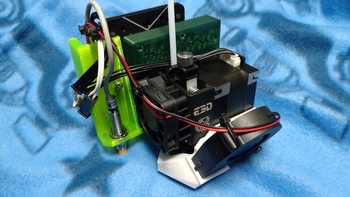


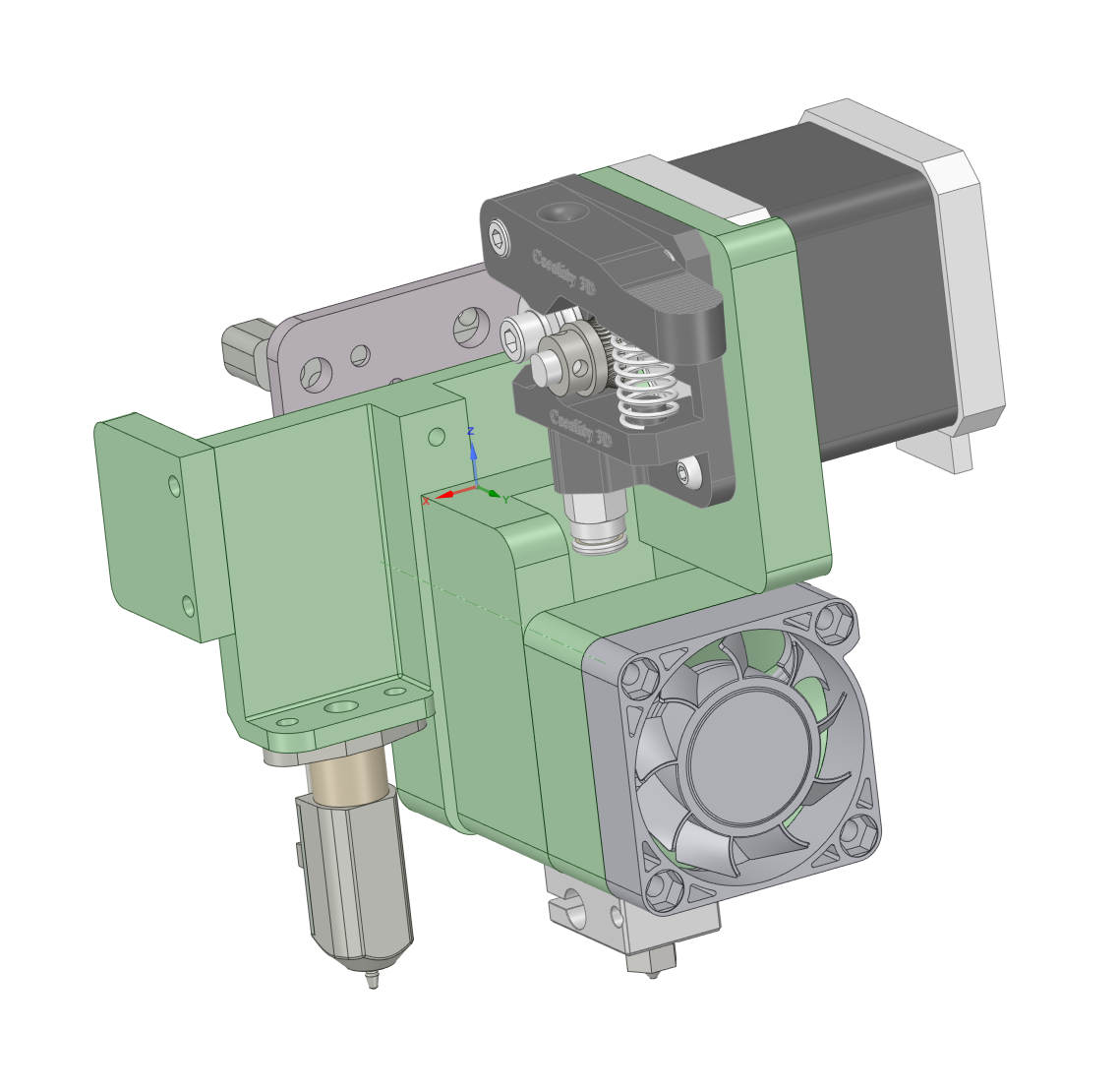
PrinterMods.comのXchange使ってますが、ノズル先端とプローブの位置は一致させて設計させてるので、センサーを同じパーツでマウントしてます。
配線は至って簡単、+5Vの線とZ MINへ信号線つなぐだけ。
(Z MINが電源を含む3芯コネクタであればそこにつなげられるようにするだけです)
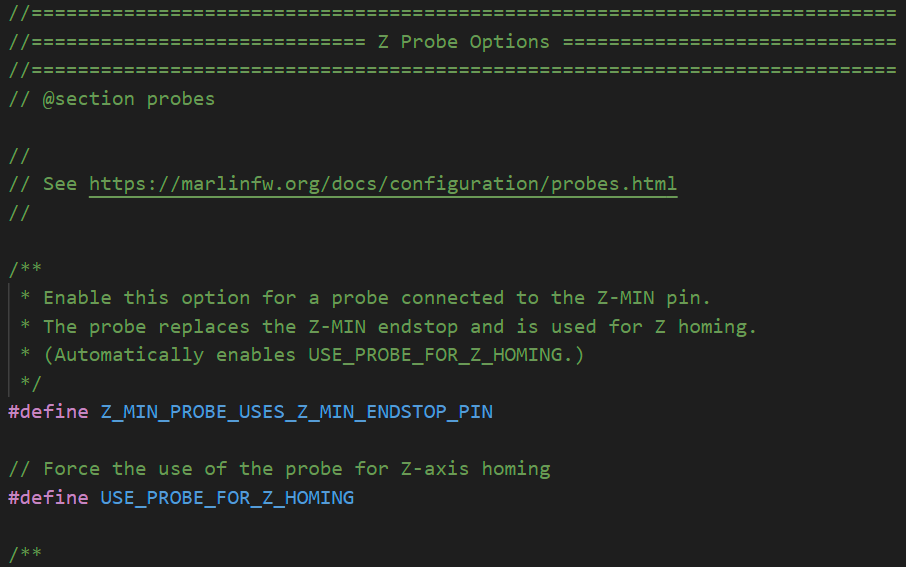
で、3D Touchじゃなくなるので、Marlinから「BL Touch」用の設定を一度全てコメントアウトし、Z軸リミットスイッチでベッドレベリングを出来るように設定し直します。
具体的には3つ変えるだけかな?
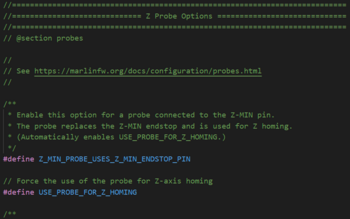
Z Probe Optionsの中の該当項目をアンコメント。
「Z軸リミットスイッチにZ軸最小値検知のプローブ使うよ」てのと「プローブをZ軸のホーム検知に使うよ」と宣言します。
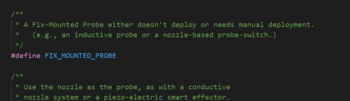
BL Touchのようにピンの出し入れを検知に使わないのでこの項目をアンコメント。
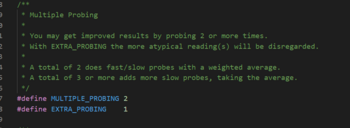
ここは任意かもしれませんが、オートでいろいろ調整する関係で確実性上げるために検知回数を決めます。
※これ、BL Touchでも有効にするとその回数きちんと拾います。
が、BL Touch系でこれ使うと、スライサーで指定入れてると印刷前の検知時間が極端に延びますw
一回やってみて、第一層の確認してから離れるのにあまりにも長かったんでやめましたが、
静電容量型近接センサーだと一瞬で終わる感じなので入れておいた方が良いです。
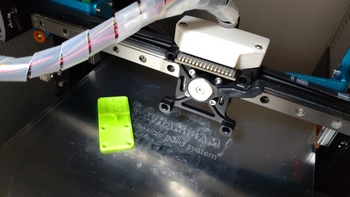
あとはオートベッドレベリングを普通に有効にすればOK。
自分がやってみた感じではこれで静電容量型近接センサーがZ軸リミットスイッチとベッドレベリングで動作しました。
変化としてはZ AXIS Auto Alignment(X軸の昇降で左右の高さを50μm以内に収める機能)で、3D Touchで約35μm、静電容量型近接センサーで約33μmという結果になりました。
3Dプリンタなので厳密に言えばほぼ同じで問題ない範囲なので気にしなくて良いですが、1μmを気にして設計業務していた身からすると「ちょっと変わるね」と感じるところかな?
※生産機械で相手が金属ならこの差で組めないなんて事は当たり前です。
<2022/12/17補足:その後調整を済ませてから同じアライメントを取りましたところ、約33μm→約26μmまでさらに詰めた調整がなされました。やはり回数やると違いが出てきます。>
余談ですが、Prusaの「P.I.N.D.A V2」の場合、内部に温度センサーがある関係で配線が増えます。
信号線の片方をメインボード上の開いている温度センサー端子へ接続、Marlinで追加の温度センサーの記述をアンコメントして有効にします。
具体的に何に使うかというと、ベッドに貼り付けている温度センサーと実際の表面温度をそれぞれで測定し、より正確な温度でベッドの状態を把握したりする為に使います。
(あと、最近は「印刷空間の温度」をMarlinで把握して動作させるという使い方もあるので、追加温度計を入れないならそれを仮に利用したり出来るはず。)
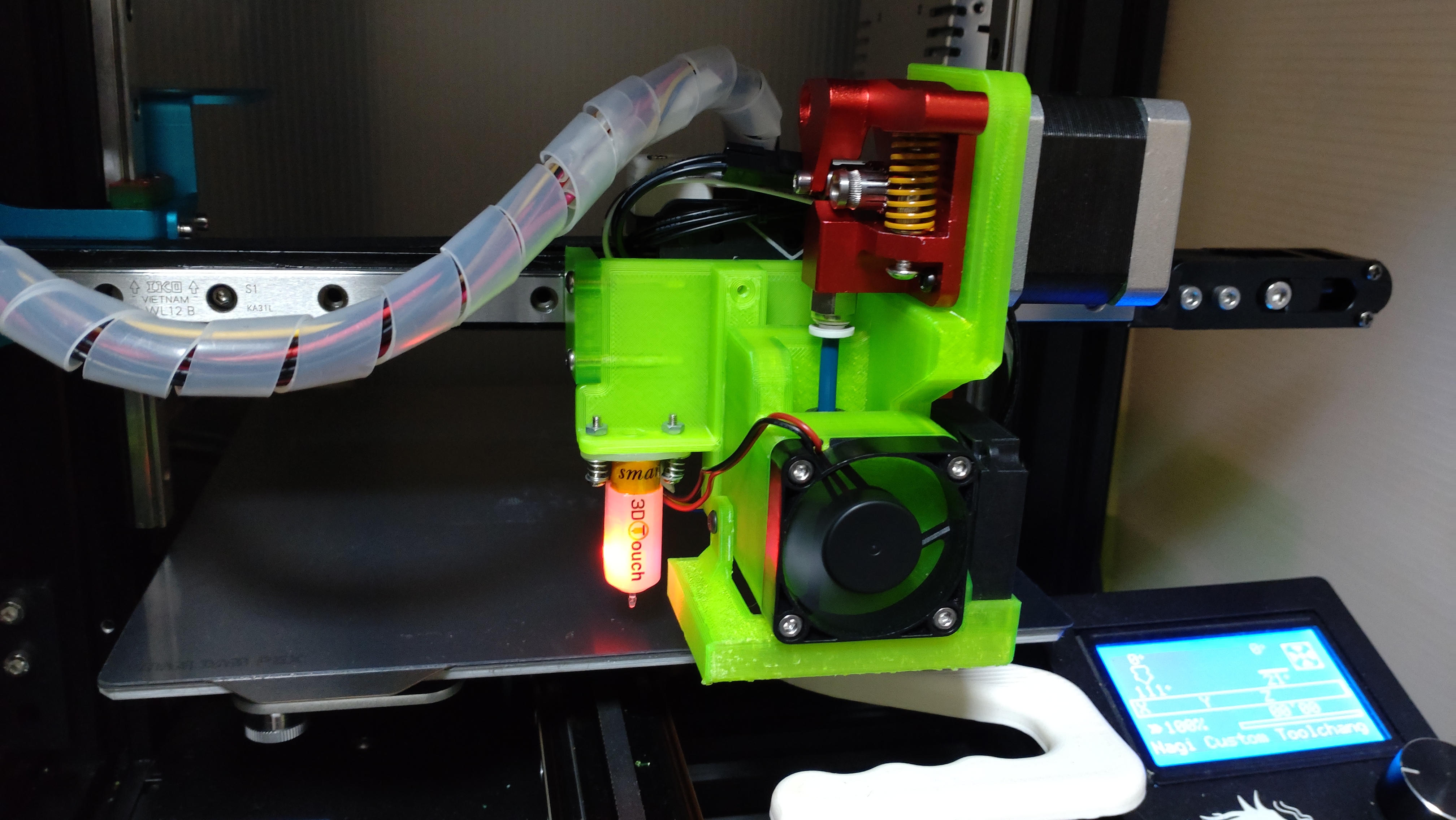
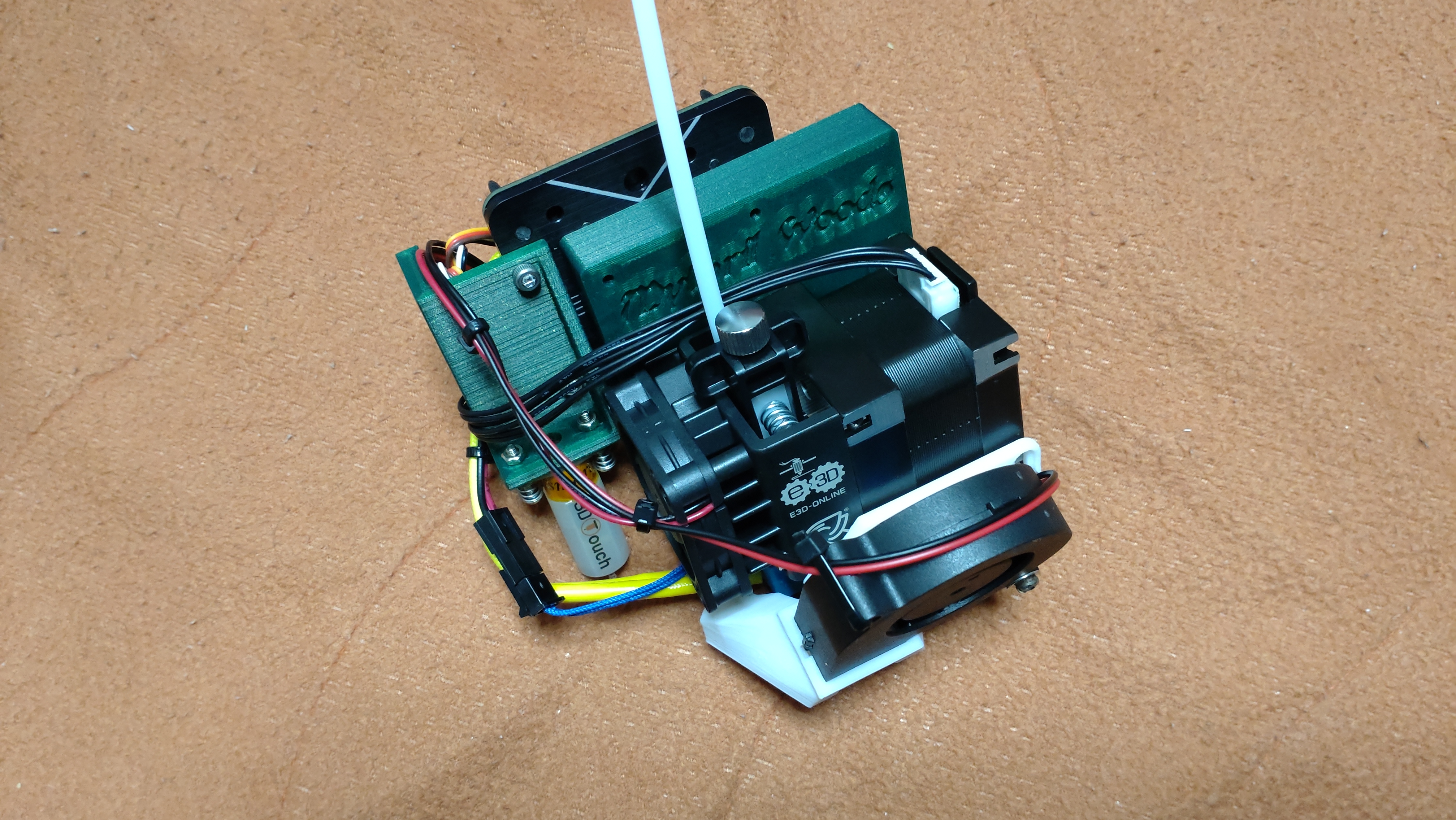
とりあえずまだ組んで動かせるようにしただけなので印刷まではしていませんが、この後Z OffsetをMarlinのオート機能使って全てのヘッドで拾ってカスタムメニューに書き込んで終了ですな。
これが出来上がったら、次はカスタムしたATOMの3D Touchを置き換える予定。
ATOMの方もメインボード変更してZ軸のドライバを2つにして独立制御させたいかな。
ベッドレベリング入れてあるんで多少ずれていても補正はしてくれますが、やっぱり作動抵抗はできるだけ減らしたいですしね。
あとは…Prusa i3のダメ潰し…
これもパーツは届いているので組み替えするだけなんですが、割と大がかりなんで気合い入れないと。
※サードパーティで組んだ結果、エクストルーダー部のV6保持が甘くてY軸方向に動いちゃってNG印刷するとかあり得ないので、本家から最新構成用のパーツ買いました(ぇ 割とシャレにならない。
ちなみに調整中に一度印刷してみた感触だと、Prusa i3 MK3がクローンとはいえかなり精度の高い印刷をするのがわかったので、本家ちょっと高いけど最初に使うならトラブル起こしにくいんじゃないかな?と思いました。
エラーの出る困った動き以外のところではめちゃくちゃきれいに積層するんですよ。
※Ender-3でダメ潰しして構成変えること考えると、合計額で多分Prusa i3買えますんで。
根本的に構造と構成、印刷の基礎を知るならEnder-3で苦労した方が後々良い部分もあります。
どっち取るかは使い方次第かな?
(ちなみにクローンパーツ寄せ集めでPrusa i3組むのはおすすめしませんw かなり大変よ(^^;)
<2022/12/17 追記>
出力するパーツがいくつか予定があるため、急ぎでそれぞれのヘッドの条件を出してMarlin2.1.1にて更新をしました。
結果はすこぶる好調で、PETGでのサポートなしのダクト形状がきれいに出力できました。
細かい動作調整はまだ詰められるところありますが、現状では以前より成功率が上がったので満足です。
昨今の半導体事情とか見ていて、3Dプリンターのメイン基板とか乗り換えが必要になったら困るのでいろいろ調べたりしていて。
いつものTriangle Labの商品をメーカーページへ見に行ったときに気がつく。
「あれ?3D Touchの商品ページが消えている…?」
そうなんです。
直販側にも表示があったBL Touch互換品の3D Touchのページがいつの間にかないぞと。
(もしかしたら忘れてるだけで最初からないのかもしれないけど←)
AliExpressの直販ショップにはあるので手に入らないわけではないんですが、最近ちょっとこのBL Touch系の更新があんまりないなと言うこともあって、予備用意しておこうかと考えたわけです。
が…まだ完成というか最終調整で手こずってるパーツ集めて組み上げてる「クローンPrusa i3」を見ていてふと思ったのですな。
※Prusa i3のXY軸はリミットスイッチを使わず負荷を検知して0点取る方式、Z軸はP.I.N.D.Aという静電容量近接型センサーと温度センサーが一体になったものが使われています。
「P.I.N.D.A系の近接センサーの方が後々困らないのでは?」と。
静電容量型近接センサーだとベッド側が金属じゃないと反応しない(表面が樹脂ベッドだと検知できない)ので、WHAM BAMみたいなスプリングスチールのビルドプレート必須になってしまいますが、
考えてみればもうそれ以外のビルドタック使わなくなってるので問題ないし、何しろBL Touchのようにプローブ破損交換も考えなくて良い、さらには配線がZ MIN使えば良いだけなので簡単かなと。
というわけで、Φ8mmの静電容量型近接センサーを必要分購入しました。
※できるだけ小型にしたかったのでTriangle Labが扱ってる商品を今回は選んでます。日本製でも5V動作のものなら大丈夫。
静電容量型近接センサー買うときに「ノーマルオープン」と「ノーマルクローズ」の2種類でどっち買えば良いか悩むかと思いますが、Prusa i3に使われている「P.I.N.D.Aはノーマルクローズ」と調べていたら出てきたので「ノーマルクローズ」を購入しています。
(理由はMarlinの設定ファイルでPrusa i3用の記述を参照して確認するためです。逆だとリミットスイッチの設定が逆になる可能性があるので。)
で、届くまでに取り付けブラケットの設計して出力しておき、届いた段階で組み付けました。
PrinterMods.comのXchange使ってますが、ノズル先端とプローブの位置は一致させて設計させてるので、センサーを同じパーツでマウントしてます。
配線は至って簡単、+5Vの線とZ MINへ信号線つなぐだけ。
(Z MINが電源を含む3芯コネクタであればそこにつなげられるようにするだけです)
で、3D Touchじゃなくなるので、Marlinから「BL Touch」用の設定を一度全てコメントアウトし、Z軸リミットスイッチでベッドレベリングを出来るように設定し直します。
具体的には3つ変えるだけかな?
Z Probe Optionsの中の該当項目をアンコメント。
「Z軸リミットスイッチにZ軸最小値検知のプローブ使うよ」てのと「プローブをZ軸のホーム検知に使うよ」と宣言します。
BL Touchのようにピンの出し入れを検知に使わないのでこの項目をアンコメント。
ここは任意かもしれませんが、オートでいろいろ調整する関係で確実性上げるために検知回数を決めます。
※これ、BL Touchでも有効にするとその回数きちんと拾います。
が、BL Touch系でこれ使うと、スライサーで指定入れてると印刷前の検知時間が極端に延びますw
一回やってみて、第一層の確認してから離れるのにあまりにも長かったんでやめましたが、
静電容量型近接センサーだと一瞬で終わる感じなので入れておいた方が良いです。
あとはオートベッドレベリングを普通に有効にすればOK。
自分がやってみた感じではこれで静電容量型近接センサーがZ軸リミットスイッチとベッドレベリングで動作しました。
変化としてはZ AXIS Auto Alignment(X軸の昇降で左右の高さを50μm以内に収める機能)で、3D Touchで約35μm、静電容量型近接センサーで約33μmという結果になりました。
3Dプリンタなので厳密に言えばほぼ同じで問題ない範囲なので気にしなくて良いですが、1μmを気にして設計業務していた身からすると「ちょっと変わるね」と感じるところかな?
※生産機械で相手が金属ならこの差で組めないなんて事は当たり前です。
<2022/12/17補足:その後調整を済ませてから同じアライメントを取りましたところ、約33μm→約26μmまでさらに詰めた調整がなされました。やはり回数やると違いが出てきます。>
余談ですが、Prusaの「P.I.N.D.A V2」の場合、内部に温度センサーがある関係で配線が増えます。
信号線の片方をメインボード上の開いている温度センサー端子へ接続、Marlinで追加の温度センサーの記述をアンコメントして有効にします。
具体的に何に使うかというと、ベッドに貼り付けている温度センサーと実際の表面温度をそれぞれで測定し、より正確な温度でベッドの状態を把握したりする為に使います。
(あと、最近は「印刷空間の温度」をMarlinで把握して動作させるという使い方もあるので、追加温度計を入れないならそれを仮に利用したり出来るはず。)
とりあえずまだ組んで動かせるようにしただけなので印刷まではしていませんが、この後Z OffsetをMarlinのオート機能使って全てのヘッドで拾ってカスタムメニューに書き込んで終了ですな。
これが出来上がったら、次はカスタムしたATOMの3D Touchを置き換える予定。
ATOMの方もメインボード変更してZ軸のドライバを2つにして独立制御させたいかな。
ベッドレベリング入れてあるんで多少ずれていても補正はしてくれますが、やっぱり作動抵抗はできるだけ減らしたいですしね。
あとは…Prusa i3のダメ潰し…
これもパーツは届いているので組み替えするだけなんですが、割と大がかりなんで気合い入れないと。
※サードパーティで組んだ結果、エクストルーダー部のV6保持が甘くてY軸方向に動いちゃってNG印刷するとかあり得ないので、本家から最新構成用のパーツ買いました(ぇ 割とシャレにならない。
ちなみに調整中に一度印刷してみた感触だと、Prusa i3 MK3がクローンとはいえかなり精度の高い印刷をするのがわかったので、本家ちょっと高いけど最初に使うならトラブル起こしにくいんじゃないかな?と思いました。
エラーの出る困った動き以外のところではめちゃくちゃきれいに積層するんですよ。
※Ender-3でダメ潰しして構成変えること考えると、合計額で多分Prusa i3買えますんで。
根本的に構造と構成、印刷の基礎を知るならEnder-3で苦労した方が後々良い部分もあります。
どっち取るかは使い方次第かな?
(ちなみにクローンパーツ寄せ集めでPrusa i3組むのはおすすめしませんw かなり大変よ(^^;)
<2022/12/17 追記>
出力するパーツがいくつか予定があるため、急ぎでそれぞれのヘッドの条件を出してMarlin2.1.1にて更新をしました。
結果はすこぶる好調で、PETGでのサポートなしのダクト形状がきれいに出力できました。
細かい動作調整はまだ詰められるところありますが、現状では以前より成功率が上がったので満足です。
2022-12-16 17:00
コメント(0)
Marlin2.1が出て [Ender-3系]
TwitterのMarlin公式からアナウンスがあってバージョン2.0.9.4と2.1が出たよと言うのを知り、
ちょっとのぞいてみたら2.0.9.4で大幅に変更や修正が入っていたので、どうせならと最新の2.1でビルドして更新させてみました。
各々の3Dプリンターに合わせた変更は以前とほぼ変わらないので画像とか細かい事は省いちゃいますが、
2.1になったことで一カ所記述というか認識の仕方が変更になって指定が変わってる部分があったのでそこだけ。
2.0.9.4から変更になっていると思われますが、昨今のRipRap機ではZ軸のモーターが3個以上になっていて、ベッドレベリングが更に正確に行われるようになったためか、モータードライバの指定できる数が大幅に増えました。
それに伴って、Configuration_adv.hの「NUM_Z_STEPPER_DRIVERS」の項目がなくなり、かわりにConfiguration.hでZ2以降のドライバをアンコメントして使うドライバを記述すれば自動的に認識されるようになっています。
モーターの反転等の細かい設定が必要な場合に「Multi-Z steppers」の項目を指定するだけになります。
あと少々面食らうかも知れないのが「記述の項目が前後して以前と見た目が違う」が結構あるので、
可能ならVS Codeを複数窓開くなどで比較しながら作業した方が間違いが少ないかも知れません。
Ender-3に早速入れてみまして、テスト印刷はまた後でやる形ですが、概ね動作に問題はなさそうです。
Z_Alignの座標指定も後で試してみないといけませんな
<2022/07/22 追記>
そういえばこの記事の後ちょっと諸事情で3Dプリンター出力ができなかったため(壊れたとかじゃないよ?w)、
書いてから結構経ってつい先日ようやく動かしたんですが…なんとこのMarlin2.1、どうやらバグ強烈なようで(ぇ
スイッチ入れて起動したら、Marlinの画面でEEPROMのイニシャライズができないエラーがとまらず、
更に言えば酷い処理オチを起こす状態になっていたため、Marlin2.0.9.3へ急遽戻して使いました。
ロムのサイズが大きくなった影響なのか?今原因探ってるところです。
サイトに行くとMarlinの大元をダウンロードする欄に珍しくバグフィックスバージョンの表示が併記されているので、そちらをベースに組み直した方が今回は安全かもしれません。
…必要ない機能をオフにしておけばメモリ容量減るはずなんだけどなぁ…
<2022/08/08 追記>
その後2.1については修正があったのか一度更新がかかって、現在(昨晩のタイミングで)2.1.1が出ました。
詳しく見てないのでどの程度変化しているかは実際にGitHubのリリースノートを見ていただくとして、
この後一度ちゃんと動くかどうか確かめてみます。
ちょっとのぞいてみたら2.0.9.4で大幅に変更や修正が入っていたので、どうせならと最新の2.1でビルドして更新させてみました。
各々の3Dプリンターに合わせた変更は以前とほぼ変わらないので画像とか細かい事は省いちゃいますが、
2.1になったことで一カ所記述というか認識の仕方が変更になって指定が変わってる部分があったのでそこだけ。
2.0.9.4から変更になっていると思われますが、昨今のRipRap機ではZ軸のモーターが3個以上になっていて、ベッドレベリングが更に正確に行われるようになったためか、モータードライバの指定できる数が大幅に増えました。
それに伴って、Configuration_adv.hの「NUM_Z_STEPPER_DRIVERS」の項目がなくなり、かわりにConfiguration.hでZ2以降のドライバをアンコメントして使うドライバを記述すれば自動的に認識されるようになっています。
モーターの反転等の細かい設定が必要な場合に「Multi-Z steppers」の項目を指定するだけになります。
あと少々面食らうかも知れないのが「記述の項目が前後して以前と見た目が違う」が結構あるので、
可能ならVS Codeを複数窓開くなどで比較しながら作業した方が間違いが少ないかも知れません。
Ender-3に早速入れてみまして、テスト印刷はまた後でやる形ですが、概ね動作に問題はなさそうです。
Z_Alignの座標指定も後で試してみないといけませんな
<2022/07/22 追記>
そういえばこの記事の後ちょっと諸事情で3Dプリンター出力ができなかったため(壊れたとかじゃないよ?w)、
書いてから結構経ってつい先日ようやく動かしたんですが…なんとこのMarlin2.1、どうやらバグ強烈なようで(ぇ
スイッチ入れて起動したら、Marlinの画面でEEPROMのイニシャライズができないエラーがとまらず、
更に言えば酷い処理オチを起こす状態になっていたため、Marlin2.0.9.3へ急遽戻して使いました。
ロムのサイズが大きくなった影響なのか?今原因探ってるところです。
サイトに行くとMarlinの大元をダウンロードする欄に珍しくバグフィックスバージョンの表示が併記されているので、そちらをベースに組み直した方が今回は安全かもしれません。
…必要ない機能をオフにしておけばメモリ容量減るはずなんだけどなぁ…
<2022/08/08 追記>
その後2.1については修正があったのか一度更新がかかって、現在(昨晩のタイミングで)2.1.1が出ました。
詳しく見てないのでどの程度変化しているかは実際にGitHubのリリースノートを見ていただくとして、
この後一度ちゃんと動くかどうか確かめてみます。
2022-06-05 17:00
コメント(0)
Ender-3に付いていたパーツ系(サードパーティ含む)でXchange用ユニットを作る [Ender-3系]
というタイトルで始まったわけですが、結果としてノーマルのまま使ったのがモーターと冷却ファン2つ、ヒートシンク(とはいえMicroswissのコピーなオールメタル型)という、結局いろいろ見つけたの使ってるやんかというお話。
あんまりいろんなパーツ作ると保守部品が増えるんでよろしくはないんだけど、どうせヘッド変えられるなら構成違いにしてみたいじゃないとかもあって作ってみることにしました。
そんな感じで、実はひっそりとGrabCADに個人開発で登録しているので(特に問われることはないです)、そこから使えるライブラリでEnder-3のホットエンドとエクストルーダー一式、BL Touchの3D CADモデルを入手してアセンブリを設計。
詳しい構造は書きませんが、Revo HEMERAやV6+BMGエクストルーダーとプローブオフセットや本体とのノズル位置は全て一致させて設計させてあります。
都合HEMERAとV6は似た構成を取れたんですが、このノーマルパーツを使うパターンではBL Touchの台座が干渉するため流用できないのでベースプレートを一体型にした感じです。
とりあえず最初に作ったこの形でPETGで出力して組もうとしてびっくりする(ぇ
なんとねぇ…拾ってきたEnder-3のホットエンド(Mk8ってのが正式名称)だと思ってたのが、実はCR-10系用だったんですよ!(ぇ
何が違うかというと、Ender-3もCR-10も同じCreality 3Dの製品なんですが「ホットエンドのヒートシンクの長さが違う」という驚きの事実を使わなくなってから知るって言う(
そうか、だから部品調達でずっと見てきて海外通販ページで「CR-10」と「Ender-3」をしきりに区別してたのかとやっと理解するに至りました。
確実にそれがわかったのがMicroswiss社の直販ページというね。しっかりEnder-3とCR-10と分けて販売してます。
見事にCR-10の方が頭がちょっと長いです。
※これ困ったことに、相互で長さは違うものの、構成一緒に変えるのであれば一緒に設計してしまえばどっちにも使えちゃうんですよ。
ノズル先端位置に合わせてパーツ冷却ノズルやオートベッドレベリング関連の部品の位置合わせりゃ良いんで。
(せっかくギターのネックアイロン作業と平行でやったのに使えなくて)若干愕然としながらも、GrabCADでもう一度モデルを探してきてEnder-3ノーマルホットエンドを確認したところ、明らかに短いって言う。
仕方ないので該当する部品の設計を修正して使えるようにして再出力しました。
で、完成しましたのがこちら。

みごと綺麗に位置関係が出て行けるようになったんですが、ここで一つ問題が。
ノズルのチョイスの関係でV6用のヒートブロックとヒーター、サーミスタを使うことにしていたのですが、
先端位置やクリアランスはよいのにもかかわらず「配線がキッチュ」という(白目
避けられるのでなんとかなるんですが、加熱して増し締めの関係で工具が入りにくいかな?となる。
※パーツ冷却ファン外してやれば良いのですが。
(余談ですが、今回からエクストルーダーとホットエンドの間にはCapricorn Premium PTFE Bowden Tubingを使い始めました。内径がΦ1.9mmなので遊びも少ないですし、PTFEチューブより耐熱性が高いです。)
配線どうしようか考えながら、「そういえばV6+BMGエクストルーダーのヒーターがV6標準の30Wだしここで予備も尽きてるから40W一式そろえておくか」と、いつものTrianglelabの商品を発注をかけに行って手が止まる。
「なんだよTrianglelab!!また良い物作りやがって!!!」w
というわけで、ここで一度ヒーター一式と一緒に「その新製品」を発注して待つことに。
しばらくして届いて組み付けたのがこちらです。
Trianglelab CHC(ceramic heating core) Kit(280℃/30W)※この状態で周辺が溶けることはありません。
今回使用したノズルもTrianglelabの超硬です。カーボン繊維とか入ったの使う可能性はあるので。
そう、Revo SixとかRevo Hemera触った方ならわかると思う「直接加熱型」なんですよ!
Revoシリーズはノズルのクイックリリースを考えてるので全てが専用品ですが、これは従来のヒートブレークとノズルを直に締め込んで使うタイプ。
もうね、見た瞬間に「やはりこの形が来たか!!」と。
加熱効率考えたらこっちの方がいいのは一目瞭然なので良ければATOMやPrusaにも使おうと考えて。
ヒーターとサーミスタの配線もコネクタ式になってるので、設定した後に分解交換が必要になっても簡単に作業できます。
※サーミスタは104GT-2なのでMarlin上では「5」を指定すれば良いです。
晴れて使えるようになったので、Z Offset割り出ししてPIDチューニングも取ってMarlinに書き込んで準備完了。
テスト印刷と言うことで、「エクストルーダーをデュアルギヤタイプにするためのパーツ」を出力することに(ぇ
※決して最初からデュアルギヤエクストルーダーを使いたかったのに、高さが違うの忘れてて付かなかったわけでは……(その通り、間違ったのよ← 予定では一足飛びしようとしたのに忘れてて)
そしたらですねぇ…良い感じで出力していたんですが、ちょっとフィラメントがスリップしたかな?と思ったけどそのまま動いていたので任せて離れたら、終わってみたら途中から印刷されて無くて終わってるって言う。
不思議なのは3Dプリンタ失敗名物「たべれない焼きそば大量生産」が無く、「ちょっと大きめの樹脂玉がノズルにくっついてるだけ」で完走しているという謎状態。
フィラメントにもギヤが削ったような跡がない。
しょうがないのでV6で出そうと用意して、ふと思ったのでエクストルーダーのキャリブレーション(100mm送り法)かけたら7mm送りが足りないって言う。
どうやら、スリップの時にノズル到達が足りて無くて引っかかり、その後は足りない分がゆるっと溶けてノズルの先端に溜まっていく状態だった模様です。
つまり、気づいてなかったけどノズル温度が高すぎてフィラメントが必要以上に流れ、アンダーが重なりすぎてフィラメントが届いてない状態がそのまま続いたようです。こんなエラーもあるのかと(
わかりゃ良いんですがちょっと面倒だし、万が一直して試してもスリップが出ないとも限らないのでV6使ってパーツは出力しました。
CHC Kitですが、これは予想以上の良い商品で、もし気になるなら標準ノズル系で使われるのであれば、コアの短い方で良いので是非とも使ってみて欲しいです。
メーカーのリファレンス動画では加熱増し締めせずに1.2N・m程度で締め込めば良いそうで、俺もそれでやって漏れ皆無です。
なので、上手くやればノズル交換楽だと思います。
で、デュアルギアエクストルーダーを作るためにこれまた3D CADモデルを入手して作り上げた第2バージョンがこちら。
エクストルーダーの位置関係修正しただけですが、案外位置関係が違うんで形が結構違うことに。
これを出力して組み上げました。
強度も問題なくきっちり形になったのでまずは大丈夫そう。
この状態でV6側のZ Offsetも再調整必要そうだったので、それと併せて両方の細かい数値を再設定、
キャリブレーションでデュアルギヤエクストルーダーのステップ値を計算しなおして反映させました。
都合テストはまだになりますが、おそらく問題は出にくいんじゃないかと今までの経験から感じてます。
ま、1層目の状態が駄目だったら調整し直せば良いのでw
して…書いてて気がついたんですが、E3DがこのタイミングでどうやらRevoノズルの最新出しそうです(`・ω・´)
CHC Kitは今回作ったヘッド用に、従来のヒーターはATOMとV6用にして、Revo SixをPrusaに入れよう。
今回もまさかの品質で信頼しているTrianglelabがすごいのを再確認した感じですな。
ちなみにねぇ…ちょっと時間が開いたけど、カプリコーンチューブを発注したときにものすごい不信感がBIQUにできてしまって、今後BIGTREETECH含めて使わなくなるかもって感じです。
カプリコーンチューブとPrusa用の変換配線発注したら、他の業者は即納なのにBIQUでは欠品になって、商品扱い下げたのに問い合わせるまで発注放置しているという最悪な対応ありましたので。
保険で他の業者使ったので組めましたが、BIQU側でチューブは在庫残ってたので送ってもらい、無かった変換ケーブルはキャンセルで返金してもらいました。
無いなら無いとなぜ言わんのだと言うね;たとえ対応が半端でも他のとこ先に言ってくるぜマジで。
メインボードも今後買うときは壊れにくい感じあるんでMakerBase社使うかな。
<2022/07/22 追記>
その後一度このタイプで出力してある程度上手くいったので、気になってた少し大きすぎるのを改善したバージョンを後に作りました。
位置関係をブラッシュアップしたら他と同じような構成にできたので、BL Touchマウントも今回は別体です。

こんな感じですな。
セッティングが完全に出たわけじゃないのでまだちょっと調整必要ですが、ホットエンドの冷却も全く問題なく動作してかなり良好な出力はできます。
やっぱり本体の調整が決まらないとCura側の設定が安定しないので、メカ的なダメ潰しは必須です。
でもって、ここへ来てMakerBaseのタッチパネルのUSBコネクタに不調が。
前から気になってたんですが、若干緩いのと抜き差しで弱ってしまうのと重なってついにデータの瞬断起こすようになってしまったようで。
これはSDカードスロットなら起きにくいのでそちら使えって事でしょうな(^^;
あんまりいろんなパーツ作ると保守部品が増えるんでよろしくはないんだけど、どうせヘッド変えられるなら構成違いにしてみたいじゃないとかもあって作ってみることにしました。
そんな感じで、実はひっそりとGrabCADに個人開発で登録しているので(特に問われることはないです)、そこから使えるライブラリでEnder-3のホットエンドとエクストルーダー一式、BL Touchの3D CADモデルを入手してアセンブリを設計。
詳しい構造は書きませんが、Revo HEMERAやV6+BMGエクストルーダーとプローブオフセットや本体とのノズル位置は全て一致させて設計させてあります。
都合HEMERAとV6は似た構成を取れたんですが、このノーマルパーツを使うパターンではBL Touchの台座が干渉するため流用できないのでベースプレートを一体型にした感じです。
とりあえず最初に作ったこの形でPETGで出力して組もうとしてびっくりする(ぇ
なんとねぇ…拾ってきたEnder-3のホットエンド(Mk8ってのが正式名称)だと思ってたのが、実はCR-10系用だったんですよ!(ぇ
何が違うかというと、Ender-3もCR-10も同じCreality 3Dの製品なんですが「ホットエンドのヒートシンクの長さが違う」という驚きの事実を使わなくなってから知るって言う(
そうか、だから部品調達でずっと見てきて海外通販ページで「CR-10」と「Ender-3」をしきりに区別してたのかとやっと理解するに至りました。
確実にそれがわかったのがMicroswiss社の直販ページというね。しっかりEnder-3とCR-10と分けて販売してます。
見事にCR-10の方が頭がちょっと長いです。
※これ困ったことに、相互で長さは違うものの、構成一緒に変えるのであれば一緒に設計してしまえばどっちにも使えちゃうんですよ。
ノズル先端位置に合わせてパーツ冷却ノズルやオートベッドレベリング関連の部品の位置合わせりゃ良いんで。
(せっかくギターのネックアイロン作業と平行でやったのに使えなくて)若干愕然としながらも、GrabCADでもう一度モデルを探してきてEnder-3ノーマルホットエンドを確認したところ、明らかに短いって言う。
仕方ないので該当する部品の設計を修正して使えるようにして再出力しました。
で、完成しましたのがこちら。
みごと綺麗に位置関係が出て行けるようになったんですが、ここで一つ問題が。
ノズルのチョイスの関係でV6用のヒートブロックとヒーター、サーミスタを使うことにしていたのですが、
先端位置やクリアランスはよいのにもかかわらず「配線がキッチュ」という(白目
避けられるのでなんとかなるんですが、加熱して増し締めの関係で工具が入りにくいかな?となる。
※パーツ冷却ファン外してやれば良いのですが。
(余談ですが、今回からエクストルーダーとホットエンドの間にはCapricorn Premium PTFE Bowden Tubingを使い始めました。内径がΦ1.9mmなので遊びも少ないですし、PTFEチューブより耐熱性が高いです。)
配線どうしようか考えながら、「そういえばV6+BMGエクストルーダーのヒーターがV6標準の30Wだしここで予備も尽きてるから40W一式そろえておくか」と、いつものTrianglelabの商品を発注をかけに行って手が止まる。
「なんだよTrianglelab!!また良い物作りやがって!!!」w
というわけで、ここで一度ヒーター一式と一緒に「その新製品」を発注して待つことに。
しばらくして届いて組み付けたのがこちらです。
Trianglelab CHC(ceramic heating core) Kit(280℃/30W)※この状態で周辺が溶けることはありません。
今回使用したノズルもTrianglelabの超硬です。カーボン繊維とか入ったの使う可能性はあるので。
そう、Revo SixとかRevo Hemera触った方ならわかると思う「直接加熱型」なんですよ!
Revoシリーズはノズルのクイックリリースを考えてるので全てが専用品ですが、これは従来のヒートブレークとノズルを直に締め込んで使うタイプ。
もうね、見た瞬間に「やはりこの形が来たか!!」と。
加熱効率考えたらこっちの方がいいのは一目瞭然なので良ければATOMやPrusaにも使おうと考えて。
ヒーターとサーミスタの配線もコネクタ式になってるので、設定した後に分解交換が必要になっても簡単に作業できます。
※サーミスタは104GT-2なのでMarlin上では「5」を指定すれば良いです。
晴れて使えるようになったので、Z Offset割り出ししてPIDチューニングも取ってMarlinに書き込んで準備完了。
テスト印刷と言うことで、「エクストルーダーをデュアルギヤタイプにするためのパーツ」を出力することに(ぇ
※決して最初からデュアルギヤエクストルーダーを使いたかったのに、高さが違うの忘れてて付かなかったわけでは……(その通り、間違ったのよ← 予定では一足飛びしようとしたのに忘れてて)
そしたらですねぇ…良い感じで出力していたんですが、ちょっとフィラメントがスリップしたかな?と思ったけどそのまま動いていたので任せて離れたら、終わってみたら途中から印刷されて無くて終わってるって言う。
不思議なのは3Dプリンタ失敗名物「たべれない焼きそば大量生産」が無く、「ちょっと大きめの樹脂玉がノズルにくっついてるだけ」で完走しているという謎状態。
フィラメントにもギヤが削ったような跡がない。
しょうがないのでV6で出そうと用意して、ふと思ったのでエクストルーダーのキャリブレーション(100mm送り法)かけたら7mm送りが足りないって言う。
どうやら、スリップの時にノズル到達が足りて無くて引っかかり、その後は足りない分がゆるっと溶けてノズルの先端に溜まっていく状態だった模様です。
つまり、気づいてなかったけどノズル温度が高すぎてフィラメントが必要以上に流れ、アンダーが重なりすぎてフィラメントが届いてない状態がそのまま続いたようです。こんなエラーもあるのかと(
わかりゃ良いんですがちょっと面倒だし、万が一直して試してもスリップが出ないとも限らないのでV6使ってパーツは出力しました。
CHC Kitですが、これは予想以上の良い商品で、もし気になるなら標準ノズル系で使われるのであれば、コアの短い方で良いので是非とも使ってみて欲しいです。
メーカーのリファレンス動画では加熱増し締めせずに1.2N・m程度で締め込めば良いそうで、俺もそれでやって漏れ皆無です。
なので、上手くやればノズル交換楽だと思います。
で、デュアルギアエクストルーダーを作るためにこれまた3D CADモデルを入手して作り上げた第2バージョンがこちら。
エクストルーダーの位置関係修正しただけですが、案外位置関係が違うんで形が結構違うことに。
これを出力して組み上げました。
強度も問題なくきっちり形になったのでまずは大丈夫そう。
この状態でV6側のZ Offsetも再調整必要そうだったので、それと併せて両方の細かい数値を再設定、
キャリブレーションでデュアルギヤエクストルーダーのステップ値を計算しなおして反映させました。
都合テストはまだになりますが、おそらく問題は出にくいんじゃないかと今までの経験から感じてます。
ま、1層目の状態が駄目だったら調整し直せば良いのでw
して…書いてて気がついたんですが、E3DがこのタイミングでどうやらRevoノズルの最新出しそうです(`・ω・´)
CHC Kitは今回作ったヘッド用に、従来のヒーターはATOMとV6用にして、Revo SixをPrusaに入れよう。
今回もまさかの品質で信頼しているTrianglelabがすごいのを再確認した感じですな。
ちなみにねぇ…ちょっと時間が開いたけど、カプリコーンチューブを発注したときにものすごい不信感がBIQUにできてしまって、今後BIGTREETECH含めて使わなくなるかもって感じです。
カプリコーンチューブとPrusa用の変換配線発注したら、他の業者は即納なのにBIQUでは欠品になって、商品扱い下げたのに問い合わせるまで発注放置しているという最悪な対応ありましたので。
保険で他の業者使ったので組めましたが、BIQU側でチューブは在庫残ってたので送ってもらい、無かった変換ケーブルはキャンセルで返金してもらいました。
無いなら無いとなぜ言わんのだと言うね;たとえ対応が半端でも他のとこ先に言ってくるぜマジで。
メインボードも今後買うときは壊れにくい感じあるんでMakerBase社使うかな。
<2022/07/22 追記>
その後一度このタイプで出力してある程度上手くいったので、気になってた少し大きすぎるのを改善したバージョンを後に作りました。
位置関係をブラッシュアップしたら他と同じような構成にできたので、BL Touchマウントも今回は別体です。
こんな感じですな。
セッティングが完全に出たわけじゃないのでまだちょっと調整必要ですが、ホットエンドの冷却も全く問題なく動作してかなり良好な出力はできます。
やっぱり本体の調整が決まらないとCura側の設定が安定しないので、メカ的なダメ潰しは必須です。
でもって、ここへ来てMakerBaseのタッチパネルのUSBコネクタに不調が。
前から気になってたんですが、若干緩いのと抜き差しで弱ってしまうのと重なってついにデータの瞬断起こすようになってしまったようで。
これはSDカードスロットなら起きにくいのでそちら使えって事でしょうな(^^;
2022-05-18 17:00
コメント(0)
E3D Revo HEMERAへ組み替え。そしてRevoヒーターすごい。 [Ender-3系]
<2022/04/19追記:大事なお話なので上に追記します。Revoノズルを導入することで、Nozzle Xをしばらく使っていてブラスノズルのことをすっかり忘れていまして。Nozzle Xは加熱状態でも先端の熱膨張が少ないので調整は冷えた状態で割と合いますが、Revoノズルは現状ブラス製ノズルだけなので加熱を加味してクリアランスを出してください。冷間と熱間で0.01mm程度の誤差が発生しやすいです。失念して何度か失敗してそう言えばと思い出したようにやってみたらかなり違います。1層目の押しつけすぎは反りや剥がれの原因になりやすい上、外壁に押しつぶしたような見た目の悪い状態が生成されます。こうなると重ねる層に影響するくらい盛り上がりが出始めますので一気に失敗しやすい状態になります。ご注意を。…カーボンPLAとかも使いたいのでRevoのNozzle Xタイプ早く出して欲しいなぁ…>
昨年秋に北欧であった3Dプリンターの展示会で発表されたE3Dの「Revo」シリーズ。
youtubeでそのインタビュー見て「これにするしかない!!」って構造見て感じ、昨年末に予約が始まったのでHEMERAをRevoノズル対応にするためのキットを速攻で予約しました。
2月末に発売開始になって、予約の順番で待ちながら様子見ていたら3月末に発送されてやっと届きました。

Revo Hemera Upgrade Kit(24V Single Nozzle Kit)。
モーター同じなんで旧来のHEMERA使ってる人は分解してエクストルーダーパーツを取り出して組み替えて使えるキットですな。
やーほんと待ち遠しかった!!
何が違うのか、そしてその結果何が起こるのかはとりあえず置いといて。
早速組み替えます。

HEMERAの構造的にエクストルーダー部は本体の取り付けに干渉しないので、付けたまま作業できます。
(が…オチがあります。)
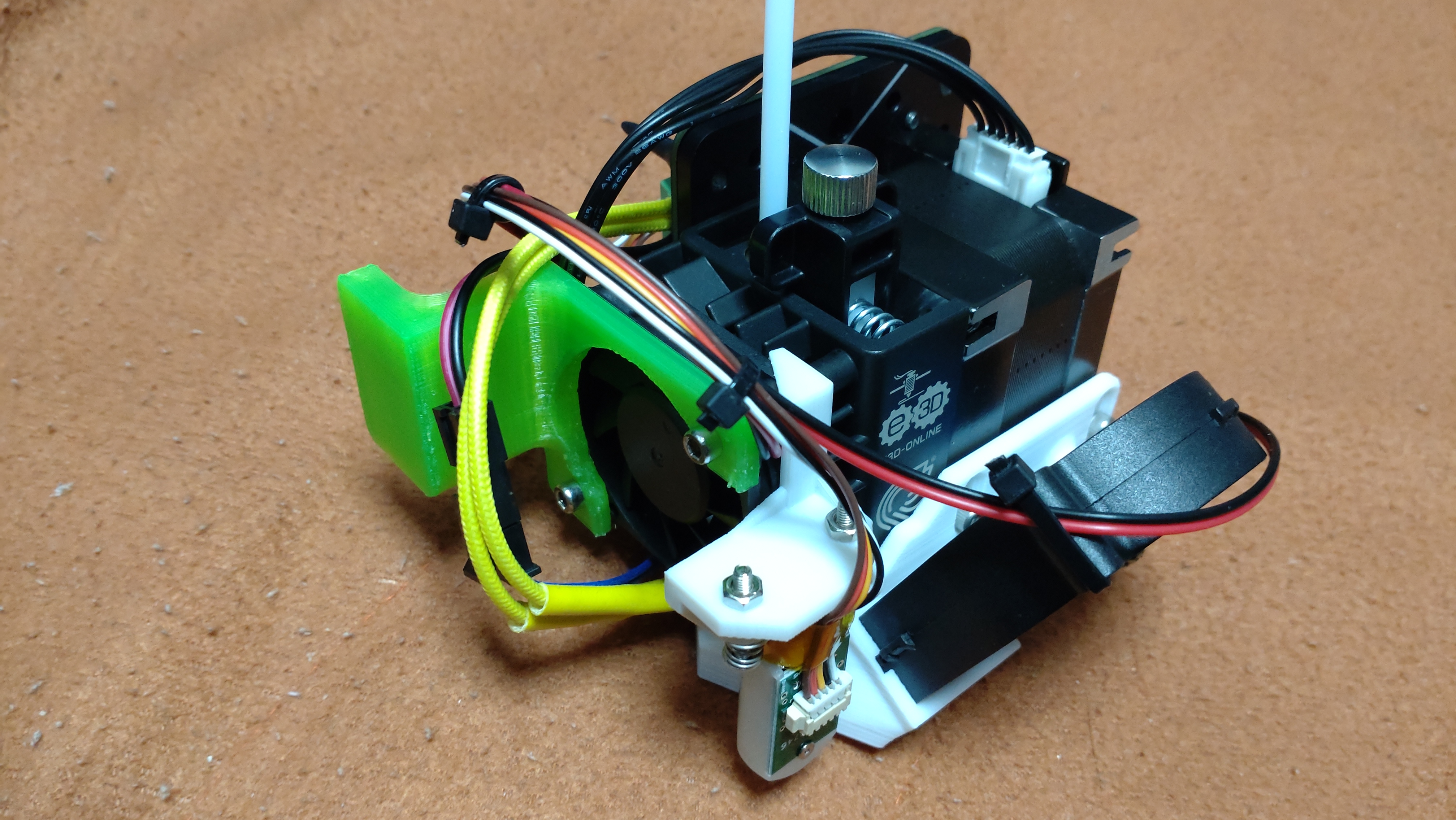
ホットエンド冷却ファンを取り外してからアウターケースを外し、写真のパーツを移植するために取り外します。


組み込み自体は難しくないんですが、フィラメントをつかむために調整したままだとスプリングが飛んでいく可能性があるので、緩めておいてから作業した方が良いです。

後は元に戻して新しいヒーターコア(サーミスタ一体です)の配線をして組み付け終了。
XChangeなんで簡単ですなこの辺は。
で、完成となった感じはするんですが…ここでさっき言ってたオチが来ます;
Revoノズルですが、海外の購入された方も話されてましたが、リプレイスが簡単なのは良いんですが、ノズル先端位置がV6と比べて2mm下へ伸びます。
なのでそのままではBL Touchなどのオートベッドレベリングを導入していると高さ調整にちょっとだけ支障が出る可能性があります。
そんな感じで、使っている3D Touchのステーを作り直すかなーと思ったんですが、これは今XChangeでノズル位置とプローブ位置を一致させて設計開始しているので動かしたくなかったので、素直にHEMERA本体を2mm上げることにしました。
こんなの見ただけじゃわからんって言う←
てことでちょっと反りに悩まされながら、原因がZ offsetなのを突き止めてなんとか新型マウントを出力。
完成させました。
Revoノズルなので加熱増し締めは必要ありません。
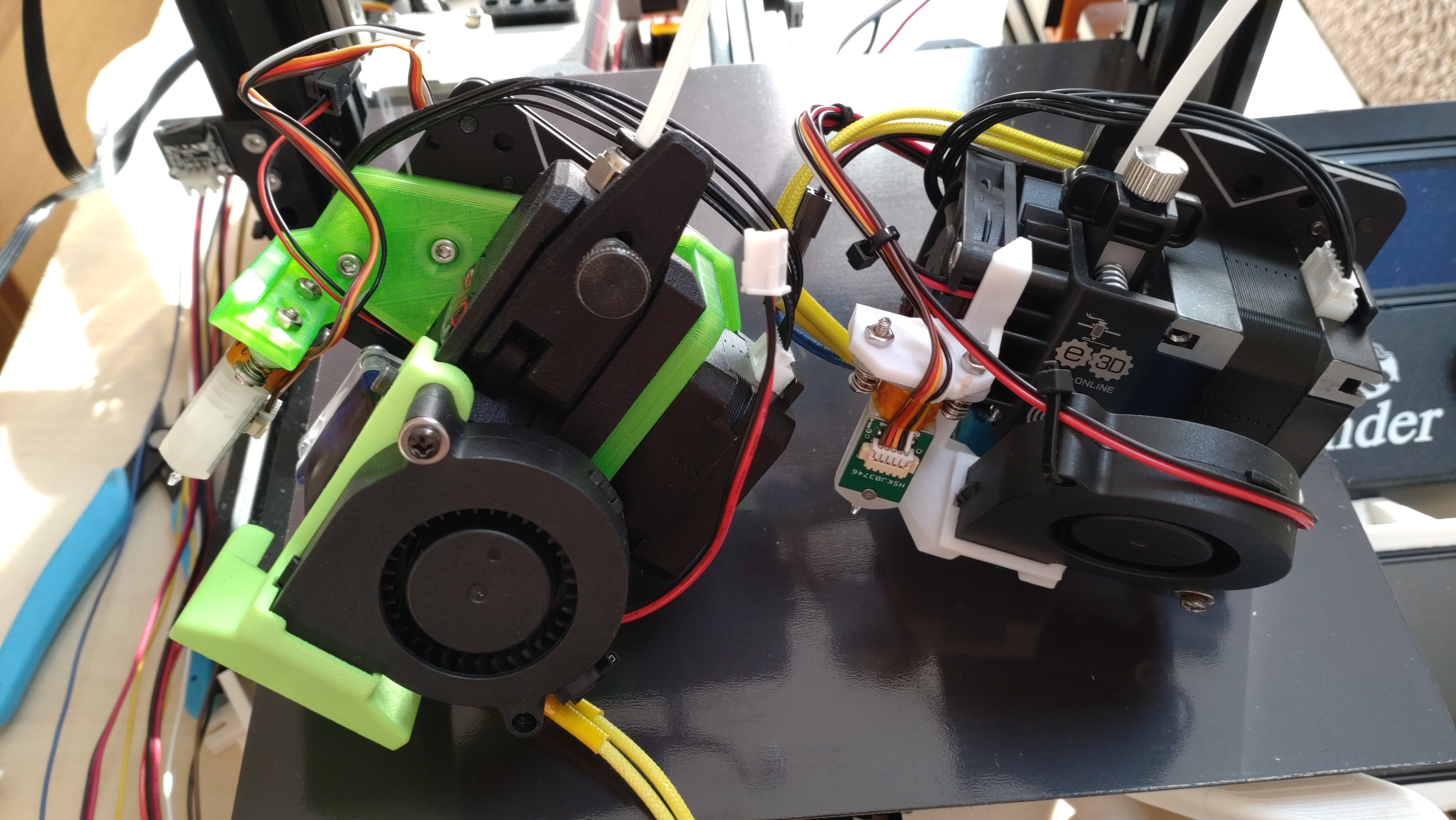
すでに何度か使ってみましたのでRevo HEMERAも汚れがつきましたが、ヒートブロック周りの違いはこんな感じです。

左がHEMERA、右がRevo HEMERAになります。
従来のV6スタイルは上から「ヒートブレーク」「ヒーターブロック」「ノズル」の3分割ですが、
Revoノズルはヒーターコアを通り抜けて、ノズルがヒートブレーク一体型なのでそのままねじ込むだけになってます。
つまり、今までのようなヒーターコア内部で隙間ができて漏れるとか気にしなくて良いのです。
もちろんオールメタルと同じ状態なので引き戻し設定はオールメタルのようにすればOK。
で、加熱系統の設計をされてる方ならこれ見てピンとくるはずです。
ヒーターを介して加熱するブロックがRevoでは小さいので「熱応答性が高い」という、フィードバック処理にはめちゃくちゃ向いてる構造ってことですな。
実際に使ってみたんですが、PID調整をオートで開始した直後からもう挙動が全く違います。
室温程度から280度までの設定でやったんですが、V6スタイルと比べたら時間が1/4、いやもっと早いんじゃないかというくらいには簡単に加熱されていきます。
冷却側も当然強く利くので片付けも楽。
出力で使っている間も安定度は極端に高いです。
HTPLA使って220℃で出力していたんですが、「一度も温度がぶれない」です(ぇ
これは驚きましたなー;
なんかすごい装備になったので大満足。
これならRevo SixやRevo Microも期待できそう。
あとはエクストルーダーでOrbiter 2.0と組み合わせてRevo Microで軽量化したいのもあるので、XChangeの他のベースとATOMはそっちで設計し直しも良いかな?
とにかくこれはとても良い!!
買って良かったですわw
あ、そうだ。
最後に思い出したので付け加えますが、先日どうしてもできなくて悩んでた「Z AXIS AUTO ALIGNMENT」ですが、ベッドサイズとプローブオフセット、マージン設定を加味してX座標の計算値がベッドサイズ以下になるようにしてみたところ無事に起動しました。
やはりベッドサイズの数字に合わせた計算値にしない方が良いみたいです。
昨年秋に北欧であった3Dプリンターの展示会で発表されたE3Dの「Revo」シリーズ。
youtubeでそのインタビュー見て「これにするしかない!!」って構造見て感じ、昨年末に予約が始まったのでHEMERAをRevoノズル対応にするためのキットを速攻で予約しました。
2月末に発売開始になって、予約の順番で待ちながら様子見ていたら3月末に発送されてやっと届きました。

Revo Hemera Upgrade Kit(24V Single Nozzle Kit)。
モーター同じなんで旧来のHEMERA使ってる人は分解してエクストルーダーパーツを取り出して組み替えて使えるキットですな。
やーほんと待ち遠しかった!!
何が違うのか、そしてその結果何が起こるのかはとりあえず置いといて。
早速組み替えます。
HEMERAの構造的にエクストルーダー部は本体の取り付けに干渉しないので、付けたまま作業できます。
(が…オチがあります。)
ホットエンド冷却ファンを取り外してからアウターケースを外し、写真のパーツを移植するために取り外します。

組み込み自体は難しくないんですが、フィラメントをつかむために調整したままだとスプリングが飛んでいく可能性があるので、緩めておいてから作業した方が良いです。
後は元に戻して新しいヒーターコア(サーミスタ一体です)の配線をして組み付け終了。
XChangeなんで簡単ですなこの辺は。
で、完成となった感じはするんですが…ここでさっき言ってたオチが来ます;
Revoノズルですが、海外の購入された方も話されてましたが、リプレイスが簡単なのは良いんですが、ノズル先端位置がV6と比べて2mm下へ伸びます。
なのでそのままではBL Touchなどのオートベッドレベリングを導入していると高さ調整にちょっとだけ支障が出る可能性があります。
そんな感じで、使っている3D Touchのステーを作り直すかなーと思ったんですが、これは今XChangeでノズル位置とプローブ位置を一致させて設計開始しているので動かしたくなかったので、素直にHEMERA本体を2mm上げることにしました。
こんなの見ただけじゃわからんって言う←
てことでちょっと反りに悩まされながら、原因がZ offsetなのを突き止めてなんとか新型マウントを出力。
完成させました。
Revoノズルなので加熱増し締めは必要ありません。
すでに何度か使ってみましたのでRevo HEMERAも汚れがつきましたが、ヒートブロック周りの違いはこんな感じです。
左がHEMERA、右がRevo HEMERAになります。
従来のV6スタイルは上から「ヒートブレーク」「ヒーターブロック」「ノズル」の3分割ですが、
Revoノズルはヒーターコアを通り抜けて、ノズルがヒートブレーク一体型なのでそのままねじ込むだけになってます。
つまり、今までのようなヒーターコア内部で隙間ができて漏れるとか気にしなくて良いのです。
もちろんオールメタルと同じ状態なので引き戻し設定はオールメタルのようにすればOK。
で、加熱系統の設計をされてる方ならこれ見てピンとくるはずです。
ヒーターを介して加熱するブロックがRevoでは小さいので「熱応答性が高い」という、フィードバック処理にはめちゃくちゃ向いてる構造ってことですな。
実際に使ってみたんですが、PID調整をオートで開始した直後からもう挙動が全く違います。
室温程度から280度までの設定でやったんですが、V6スタイルと比べたら時間が1/4、いやもっと早いんじゃないかというくらいには簡単に加熱されていきます。
冷却側も当然強く利くので片付けも楽。
出力で使っている間も安定度は極端に高いです。
HTPLA使って220℃で出力していたんですが、「一度も温度がぶれない」です(ぇ
これは驚きましたなー;
なんかすごい装備になったので大満足。
これならRevo SixやRevo Microも期待できそう。
あとはエクストルーダーでOrbiter 2.0と組み合わせてRevo Microで軽量化したいのもあるので、XChangeの他のベースとATOMはそっちで設計し直しも良いかな?
とにかくこれはとても良い!!
買って良かったですわw
あ、そうだ。
最後に思い出したので付け加えますが、先日どうしてもできなくて悩んでた「Z AXIS AUTO ALIGNMENT」ですが、ベッドサイズとプローブオフセット、マージン設定を加味してX座標の計算値がベッドサイズ以下になるようにしてみたところ無事に起動しました。
やはりベッドサイズの数字に合わせた計算値にしない方が良いみたいです。
2022-04-12 17:00
コメント(0)
Z軸のオートアライメントメニューが何故かうまくいかない。 [Ender-3系]
久々にEnder-3のお話。
記事にはしていませんが、今手元にあるクローンPrusa i3 MK3はすでに動く状態が確保されて全ての機能が使えるに至っていますが、ホットエンドをV6から最近やっと発送が始まったRevo Sixにしたいのでテスト印刷を待っている状態です。
(このクローン作るのに部品でそろえて組み上げるということをしたんですが、まぁいろいろ問題が出ては都度修正購入なんてのがいくつかあって大変でした(^^; それは後の記事で。)
さて、このクローンを作り上げたことで初めてどう動くのかを知った「Z AXIS AUTO ALIGNMENT」な訳ですが。
Z軸の昇降にステッピングモーターを2個使った場合、左右で高さがずれてるとX軸の移動で斜めに上るか下るかしてしまうので、ベッド側でノズルクリアランスを調整するマシンだと最初が肝心になってしまいます。
んじゃどこで平行取るのよ?となるともうフレームになんか同じ長さで左右差が0.01mm以下クラスで同じ支柱とかを使って合わせるしかないのですけども、フレームひずんだらもうどうしようもないわけで。
んじゃどうしましょうかって考えると出てくるのがベッドをリジッドにしてしまって、最初から昇降に対してベッドを水平にしてしまい(この作業自体は専用に売ってるパーツで事足りますし、レール化していればベースがちゃんとしてればリジッド化する支柱の長さを同じにしてしまえば誤差範囲になります)、ベッドレベリングで平面の誤差を拾ってしまって使えばまぁ問題も無いです。
が…Z軸が左右でずれてると、たとえベッドレベリングでノズル位置を調整しながら動かしたとして、Z軸のリードスクリューの動きが多いまま(回数が多いってことね)なのでなんかもやっとする感じがあり。
そこへクローンPrusa i3作ってる間に目にした情報で「これは楽だな」と思ったのでPrusa側で試してうまくいきました。
クローンPrusa i3には手元で余っていたBigtreetech SKR V1.4 Turboで組み上げて、そこにMarlin2.0.9.2入れて成功した感じ。
設定自体は簡単だったんですが…Ender-3に持ってきたら何故かこれが「Probing Failed」となってしまってうまく作動しない。
Ender-3のメインボードは以前書いたようにMakerbase MKS SGEN L V2で組み上げてあるのですが、何が違うのか?;
不思議な話でBL Touch(実際にはクローンのTrianglelab 3D Touchですが)で行うベッドレベリングは全く問題なく動作しているので壊れているわけではないようで。
参考までにいつも見ている海外のyoutubeチャンネルでのオートアライメントを見てみましたけど、全く違うところがないので迷宮に入りっぱなしに。
いろいろ調べてみたところ、割とこの状態で「Auto Alignment」メニューがエラーで失敗して走らない人が多いようで、Githubのフォーラムでも「なんで動かないのさ?;」てのが結構あって。
中にはバグだと言うことでMarlinのConfiguration.hの「#define PROBING_MARGIN 10」の設定値「10」以上で動かなくなるとか「#define Z_PROBE_FEEDRATE_FAST (15*60)」(4を15に書き換えたそうです)にしたら動いたとかあったんですが…どちらも全く俺の方では改善せず。
Force SW Modeかな?って思ったんだけどこれは信号にノイズがのらないようにするお話なので違うし。
SW Modeでたまに動くなんてのも見かけましたけども、やってみて結果変わらず。
というか、Probing Marginってなんぞやってこれでわかったんですけど、これMarlinが自動でレベリング操作するときの場所の計算で、安全圏取って内側に寄せる項目なんですね。
これ減らしたらベッドの外に行きそうになって大慌てで電源落としました;
※くれぐれもZ MIN LIMITをカットしてるときは注意してくださいませ;
で、あとどこが違うのかって考えたらもうBL TouchなのかP.I.N.D.A. V2なのかの差しかなくて。
Ender-3の場合、俺は今はWHAM BAMのスプリングスチールシート+PEX貼り付けで使ってますけども、
時には樹脂ベッド使う可能性も否定はできないので対物センサーとしてはP.I.N.D.A.系は使えないわけで。
(P.I.N.D.A. V2とか他のものは金属じゃないと検出できないのが多いです)
配線やらピン配置、いろんなの考えましたけど今回は答えが出ず。
どうやらこういうときはボードの相性らしいってのが複数台でテストした人の意見でした。
ボード交換するにもSGEN L V2ってもう作ってないですし…それならLPC1769使うの古くなってSTM32F4に全体的にシフトが始まってるのでそっちで試すしかないし。
つまりボードが悪いのかは検証全くできない(
結果的に、先ほど書いた「同じ長さで誤差がめっちゃ少ない支柱」でレベル出す方法にしたわけです(--;
支柱自体は以前、固定ベッドにしたのでこれでやらないとかな?って思って買ってあったのでそれ使いました。
MonotaROとかで売ってる機械構造体用の支柱で買えば大体大丈夫です。
(支柱の設計指定ってかなりうるさいので)
あとは手でモーター回してやりゃ良い。
しかし何がいけないのか全くわからないな今回は;
何やっても動きが変わらないのがなんとも気持ち悪いです。
まぁ無くてもなんとかなるわけで、今回は使えるマシンにだけ入れてって感じで。
あ、そうそう、話としては全く別ですが、HEMERAをRevoタイプに変更するキットを予約していたのが発送されていました。
とりあえずは航空便で来るようですが…昨今の状況調べたらイギリスからの発送、小包になってしまう場合はどうやら現状で「船便」の用です;
海外通販で大物買うことが多い人はこの辺調べてから今は動いた方が良いかもですな;
船便だとおそらく航空便と比べたら配送料が大変なことになるかもしれませんので;
(XChangeのキットの配送でもこう言う話が起きているらしく、日本は大丈夫でしたけど他の国で買った人が送料大変なことになってトラブってるみたいなのも見かけました;会社が悪いわけじゃなくて状況でそれしかなくてなので困ったもんだなと;)
<2022/04/12 追記>
その後「もしや?」と思って、2カ所目の指定座標のX値をプローブオフセットとマージンを含めた計算で235にならないように(Ender-3だとベッドサイズが235mm)少しだけ小さい値になるように調整したところ、無事に起動してアライメントが自動で取れるようになりました。
X=235(最大値)に計算で合わせると範囲外に飛んだとMarlinが認識するようです。
おそらくですが、「MarlinのConfiguration.h」の「PROBING_MARGIN」の数字で指定する外周の幅は範囲外と捉えているのかもしれません。
動かないと悩んでいるときは少し内側に設定するようにしてみると良いかもしれませんな。
記事にはしていませんが、今手元にあるクローンPrusa i3 MK3はすでに動く状態が確保されて全ての機能が使えるに至っていますが、ホットエンドをV6から最近やっと発送が始まったRevo Sixにしたいのでテスト印刷を待っている状態です。
(このクローン作るのに部品でそろえて組み上げるということをしたんですが、まぁいろいろ問題が出ては都度修正購入なんてのがいくつかあって大変でした(^^; それは後の記事で。)
さて、このクローンを作り上げたことで初めてどう動くのかを知った「Z AXIS AUTO ALIGNMENT」な訳ですが。
Z軸の昇降にステッピングモーターを2個使った場合、左右で高さがずれてるとX軸の移動で斜めに上るか下るかしてしまうので、ベッド側でノズルクリアランスを調整するマシンだと最初が肝心になってしまいます。
んじゃどこで平行取るのよ?となるともうフレームになんか同じ長さで左右差が0.01mm以下クラスで同じ支柱とかを使って合わせるしかないのですけども、フレームひずんだらもうどうしようもないわけで。
んじゃどうしましょうかって考えると出てくるのがベッドをリジッドにしてしまって、最初から昇降に対してベッドを水平にしてしまい(この作業自体は専用に売ってるパーツで事足りますし、レール化していればベースがちゃんとしてればリジッド化する支柱の長さを同じにしてしまえば誤差範囲になります)、ベッドレベリングで平面の誤差を拾ってしまって使えばまぁ問題も無いです。
が…Z軸が左右でずれてると、たとえベッドレベリングでノズル位置を調整しながら動かしたとして、Z軸のリードスクリューの動きが多いまま(回数が多いってことね)なのでなんかもやっとする感じがあり。
そこへクローンPrusa i3作ってる間に目にした情報で「これは楽だな」と思ったのでPrusa側で試してうまくいきました。
クローンPrusa i3には手元で余っていたBigtreetech SKR V1.4 Turboで組み上げて、そこにMarlin2.0.9.2入れて成功した感じ。
設定自体は簡単だったんですが…Ender-3に持ってきたら何故かこれが「Probing Failed」となってしまってうまく作動しない。
Ender-3のメインボードは以前書いたようにMakerbase MKS SGEN L V2で組み上げてあるのですが、何が違うのか?;
不思議な話でBL Touch(実際にはクローンのTrianglelab 3D Touchですが)で行うベッドレベリングは全く問題なく動作しているので壊れているわけではないようで。
参考までにいつも見ている海外のyoutubeチャンネルでのオートアライメントを見てみましたけど、全く違うところがないので迷宮に入りっぱなしに。
いろいろ調べてみたところ、割とこの状態で「Auto Alignment」メニューがエラーで失敗して走らない人が多いようで、Githubのフォーラムでも「なんで動かないのさ?;」てのが結構あって。
中にはバグだと言うことでMarlinのConfiguration.hの「#define PROBING_MARGIN 10」の設定値「10」以上で動かなくなるとか「#define Z_PROBE_FEEDRATE_FAST (15*60)」(4を15に書き換えたそうです)にしたら動いたとかあったんですが…どちらも全く俺の方では改善せず。
Force SW Modeかな?って思ったんだけどこれは信号にノイズがのらないようにするお話なので違うし。
SW Modeでたまに動くなんてのも見かけましたけども、やってみて結果変わらず。
というか、Probing Marginってなんぞやってこれでわかったんですけど、これMarlinが自動でレベリング操作するときの場所の計算で、安全圏取って内側に寄せる項目なんですね。
これ減らしたらベッドの外に行きそうになって大慌てで電源落としました;
※くれぐれもZ MIN LIMITをカットしてるときは注意してくださいませ;
で、あとどこが違うのかって考えたらもうBL TouchなのかP.I.N.D.A. V2なのかの差しかなくて。
Ender-3の場合、俺は今はWHAM BAMのスプリングスチールシート+PEX貼り付けで使ってますけども、
時には樹脂ベッド使う可能性も否定はできないので対物センサーとしてはP.I.N.D.A.系は使えないわけで。
(P.I.N.D.A. V2とか他のものは金属じゃないと検出できないのが多いです)
配線やらピン配置、いろんなの考えましたけど今回は答えが出ず。
どうやらこういうときはボードの相性らしいってのが複数台でテストした人の意見でした。
ボード交換するにもSGEN L V2ってもう作ってないですし…それならLPC1769使うの古くなってSTM32F4に全体的にシフトが始まってるのでそっちで試すしかないし。
つまりボードが悪いのかは検証全くできない(
結果的に、先ほど書いた「同じ長さで誤差がめっちゃ少ない支柱」でレベル出す方法にしたわけです(--;
支柱自体は以前、固定ベッドにしたのでこれでやらないとかな?って思って買ってあったのでそれ使いました。
MonotaROとかで売ってる機械構造体用の支柱で買えば大体大丈夫です。
(支柱の設計指定ってかなりうるさいので)
あとは手でモーター回してやりゃ良い。
しかし何がいけないのか全くわからないな今回は;
何やっても動きが変わらないのがなんとも気持ち悪いです。
まぁ無くてもなんとかなるわけで、今回は使えるマシンにだけ入れてって感じで。
あ、そうそう、話としては全く別ですが、HEMERAをRevoタイプに変更するキットを予約していたのが発送されていました。
とりあえずは航空便で来るようですが…昨今の状況調べたらイギリスからの発送、小包になってしまう場合はどうやら現状で「船便」の用です;
海外通販で大物買うことが多い人はこの辺調べてから今は動いた方が良いかもですな;
船便だとおそらく航空便と比べたら配送料が大変なことになるかもしれませんので;
(XChangeのキットの配送でもこう言う話が起きているらしく、日本は大丈夫でしたけど他の国で買った人が送料大変なことになってトラブってるみたいなのも見かけました;会社が悪いわけじゃなくて状況でそれしかなくてなので困ったもんだなと;)
<2022/04/12 追記>
その後「もしや?」と思って、2カ所目の指定座標のX値をプローブオフセットとマージンを含めた計算で235にならないように(Ender-3だとベッドサイズが235mm)少しだけ小さい値になるように調整したところ、無事に起動してアライメントが自動で取れるようになりました。
X=235(最大値)に計算で合わせると範囲外に飛んだとMarlinが認識するようです。
おそらくですが、「MarlinのConfiguration.h」の「PROBING_MARGIN」の数字で指定する外周の幅は範囲外と捉えているのかもしれません。
動かないと悩んでいるときは少し内側に設定するようにしてみると良いかもしれませんな。
2022-03-28 17:00
コメント(0)
Ender-3にXchangeシステム導入 [Ender-3系]
さて、やっと組み付けられました…
諸事情あって作業できる部屋をほかのことに使うことになっていたので、それが終わるまで触れない感じでした(^^;
PrinterMods.comが昨年の今頃KickStarterで出資を募りプレッジしてプロジェクト成功し、今年前半の物流影響で材料が手に入らず待つしかなくなり、10月にやっと製品が届いた「Xchange」。
ものとしてはヘッドの交換をできるようにしてフィラメント変更を途中でできるようにしたり、ノズル径違いでツール変更したりといろいろアイデアで道具を切り替えられるユニットです。
磁力固定なんですが、4kgくらいまで余裕で耐えます。
準備している間にMarlinの記述やら必要になる部品の出力を先にしたりとやってたんですが、結局ほぼ全部やり直しが起きましたので現物合わせのことを考えるなら、横にもう一台3Dプリンターがあった方が楽かもしれません。
※直前まで使っていたホットエンドの設定が使える状態なら組んだ後でもなんとかはできます。
そんなわけで組み付けへ。
まずはX軸についている今までのホットエンド回りを取り外し、俺のはリニアガイドになってるのでベルト緩めて台座まで取り外します。
まぁ簡単なお話なので細かい写真は撮ってませんが、Xchange自体はリミットスイッチを押す部分が存在しませんので、最初の段階で俺はリミットスイッチを押す板を作っておいて挟み込んで固定しました。
(これ、最後には取り外しましたのでなくても良いです)

2mm厚で取り付け部を作ったのでこの時はM3×8でレールに固定しています。
ベルトを付属のものへ変更しますが(メーカー側で指定ベルトを一緒に買うことを推奨しています)、ここで大事なことが一点。
Ender-3のノーマルではVスロット・リニアガイドにかかわらず「下側」でベルトを引っかけますが、Xchangeは「上側」でベルトを引っかける構造になります。
その結果、MarlinのX軸の移動方向を入れ替えておかないと逆に動くようになるので注意。
※俺はめんどかったのでその場でコネクタの端子を入れ替えて反転させました。
そして外したヘッド回りをXchaneのツールマウンタ側へ。

でまぁとりあえず組んだ状態が動作するかをチェック。
問題がなかったので各種細かい調整値を割り出す作業に入ったんですが…ここで大問題発生。
BGMエクストルーダー+V6ホットエンドの方は普通にツールチェンジメニューでいけたんですが、Hemeraの方がX軸の最大値が大幅に減ってしまい悩むことに。
(これが前の記事のMarlinでのリミットスイッチで拾う最小値設定の影響です)
ここからMarlinとの格闘が3日続きました(ぇ
何やってもHemera側で正面から見てベッド右側15mmの範囲が使えない。
ここでまず思ったのは「リミットスイッチで与えるXの最小値がそれぞれで大幅に違う」ので、同じ数値で良いようにリミットスイッチを押すブロックを追加してみました。
しれっとV6側のBL Touchマウント方向が変わってますが、これは以前ちょっと失敗あったので台座ごと全部新調したためです。
(前にソックスが外れかけてフィラメントが中にたまった結果、ヒーターとサーミスタの固定ボルトが埋まって焦げて外しにくくなってしまったのと、それが原因でヒートブロックが予定と逆にしかつけられなくなりパーツクーラーが熱害受けそう、さらにホットエンド冷却ファンの設置干渉を忘れて納得いかなくなった)
この変更に伴って、先ほどのリミットスイッチを押すプレートは外しました。
当然取り付けネジが底突き起こして固定ができなくなるので、M3×6キャップボルトで取り付け。
BMGの方はこれで問題なくなったんですが…Hemeraは相変わらず同じ範囲にノズルが到達できない。
そこでツールヘッドオフセットを新たにメニューに加えてみて試したんですがことごとく同じ位置で止まってしまう。
ソフトウェアリミットを解除することも考えましたが、どうみてもそれで直るとは思えない。
で、動作を確認していたところ気がつく。
「HemeraつけたときのX軸のMAX側の移動範囲の残りが圧倒的に足りない!」(ぇ
そうなんです、XchangeのHemera用取り付け穴を信用してつけると、Ender-3の場合は最大「X=208」で限界になっちゃうんです;
これ、V6基準で作ったからかな?って思いもしたんですが、お互いの構成を見ていてノズル位置が極端に違うのを改めて確認。
Hemeraの方がそのままつけるとツールマウントの左側から飛び出してしまうのではと言うくらいオフセットしちゃうんですね。
そのせいでX軸MAX値で移動距離が足らなくなって問題を起こすと;
…ちゃんと考えて作ってよーもう;
おまけにBMGエクストルーダーにV6を直付けしたダイレクトドライブと共有しようとすると、高さの問題で付け替え後のオートホームでベッドとV6が干渉して事故を起こす可能性が出てしまう。
てことで、どうせリミットスイッチの話やこの辺の事故回避するなら、Hemeraの取り付け位置を変更してしまえ!!と新たにブラケット作りました。
V6のノズル位置に合わせたので結構位置が変わるため、PETGでは強度不足になるのを考えて、改めてHTPLAを調達して組みました。
(この部品はBMG+V6の方がすでに印刷できる状態だったので、Xchange取り付けの終わったEnder-3で出しました。やはり別途追加したMOSFETボードが大効果を出していて、一発で綺麗なモデルが出力されました。上手くいかない人はやっぱり追加した方が良いと思います。)
これで確実にベッドの全体を使えるようにやっとなりました。
あとは細かい数字というか、Marlinに必要なプローブオフセット値を入れ、実際にZ Probe Offsetを調整出してから改めて書き入れれば完成というところ。
これで2種類のヘッドが使用可能になりました。
ちなみに電源入れてからヘッド交換すると、3D Touchが起動時のテストをしていない状態になるので点滅してしまいますが、動作的には全く問題なくレベリングしてくれます。
気になる人は使うヘッドを電源投入前に付け替えて、起動後にツールチェンジメニューで変更しましょう。
俺はそうやってます。
しかし今回は作業中に修正が結構必要だった関係で、マウントする部品の出力が必要になってしまい、
ATOMのスタンドアロン化しておいたのが大活躍しました。
これでEnder-3の改造に関しては最後になるでしょう。
ヘッド回りの最新技術が出たりしたらツール追加したりすると思いますが、そのくらい。
(2022/01/08 追記:この記事を書いてすぐに予約販売が開始になりましたが、E3Dの新ノズル「Revo」シリーズが登場しましたので、今後発売され次第ノズル系は置き換えていきます。Hemeraのコンバージョンキットはすでに予約しましたのでそちらにします。V6側もほかにエクストルーダーで都合の良いものが見つかったのでRevo Microと組み合わせて軽量版を新規に起こします。が、記事としては起こしません。ここまで触れる方だとおそらく当たり前の範囲になりますので。)
やっと俺の満足するEnder-3になりました。
あとはいろいろ造形頑張っていただかないとですなw
<2022/01/02 追記>
まだちょっとかかると思いますが、Ender-3をここまで改造する間に一度通ったMicro Swissコピーのオールメタルホットエンドを使った、ストックパーツを組み合わせたツールをデザインしています。
あとはパーツ冷却用のダクトだけなんですけど、形をどうしようか迷っています。
コンセプト的に余り物で組む形ですな。
諸事情あって作業できる部屋をほかのことに使うことになっていたので、それが終わるまで触れない感じでした(^^;
PrinterMods.comが昨年の今頃KickStarterで出資を募りプレッジしてプロジェクト成功し、今年前半の物流影響で材料が手に入らず待つしかなくなり、10月にやっと製品が届いた「Xchange」。
ものとしてはヘッドの交換をできるようにしてフィラメント変更を途中でできるようにしたり、ノズル径違いでツール変更したりといろいろアイデアで道具を切り替えられるユニットです。
磁力固定なんですが、4kgくらいまで余裕で耐えます。
準備している間にMarlinの記述やら必要になる部品の出力を先にしたりとやってたんですが、結局ほぼ全部やり直しが起きましたので現物合わせのことを考えるなら、横にもう一台3Dプリンターがあった方が楽かもしれません。
※直前まで使っていたホットエンドの設定が使える状態なら組んだ後でもなんとかはできます。
そんなわけで組み付けへ。
まずはX軸についている今までのホットエンド回りを取り外し、俺のはリニアガイドになってるのでベルト緩めて台座まで取り外します。
まぁ簡単なお話なので細かい写真は撮ってませんが、Xchange自体はリミットスイッチを押す部分が存在しませんので、最初の段階で俺はリミットスイッチを押す板を作っておいて挟み込んで固定しました。
(これ、最後には取り外しましたのでなくても良いです)
2mm厚で取り付け部を作ったのでこの時はM3×8でレールに固定しています。
ベルトを付属のものへ変更しますが(メーカー側で指定ベルトを一緒に買うことを推奨しています)、ここで大事なことが一点。
Ender-3のノーマルではVスロット・リニアガイドにかかわらず「下側」でベルトを引っかけますが、Xchangeは「上側」でベルトを引っかける構造になります。
その結果、MarlinのX軸の移動方向を入れ替えておかないと逆に動くようになるので注意。
※俺はめんどかったのでその場でコネクタの端子を入れ替えて反転させました。
そして外したヘッド回りをXchaneのツールマウンタ側へ。
でまぁとりあえず組んだ状態が動作するかをチェック。
問題がなかったので各種細かい調整値を割り出す作業に入ったんですが…ここで大問題発生。
BGMエクストルーダー+V6ホットエンドの方は普通にツールチェンジメニューでいけたんですが、Hemeraの方がX軸の最大値が大幅に減ってしまい悩むことに。
(これが前の記事のMarlinでのリミットスイッチで拾う最小値設定の影響です)
ここからMarlinとの格闘が3日続きました(ぇ
何やってもHemera側で正面から見てベッド右側15mmの範囲が使えない。
ここでまず思ったのは「リミットスイッチで与えるXの最小値がそれぞれで大幅に違う」ので、同じ数値で良いようにリミットスイッチを押すブロックを追加してみました。
しれっとV6側のBL Touchマウント方向が変わってますが、これは以前ちょっと失敗あったので台座ごと全部新調したためです。
(前にソックスが外れかけてフィラメントが中にたまった結果、ヒーターとサーミスタの固定ボルトが埋まって焦げて外しにくくなってしまったのと、それが原因でヒートブロックが予定と逆にしかつけられなくなりパーツクーラーが熱害受けそう、さらにホットエンド冷却ファンの設置干渉を忘れて納得いかなくなった)
この変更に伴って、先ほどのリミットスイッチを押すプレートは外しました。
当然取り付けネジが底突き起こして固定ができなくなるので、M3×6キャップボルトで取り付け。
BMGの方はこれで問題なくなったんですが…Hemeraは相変わらず同じ範囲にノズルが到達できない。
そこでツールヘッドオフセットを新たにメニューに加えてみて試したんですがことごとく同じ位置で止まってしまう。
ソフトウェアリミットを解除することも考えましたが、どうみてもそれで直るとは思えない。
で、動作を確認していたところ気がつく。
「HemeraつけたときのX軸のMAX側の移動範囲の残りが圧倒的に足りない!」(ぇ
そうなんです、XchangeのHemera用取り付け穴を信用してつけると、Ender-3の場合は最大「X=208」で限界になっちゃうんです;
これ、V6基準で作ったからかな?って思いもしたんですが、お互いの構成を見ていてノズル位置が極端に違うのを改めて確認。
Hemeraの方がそのままつけるとツールマウントの左側から飛び出してしまうのではと言うくらいオフセットしちゃうんですね。
そのせいでX軸MAX値で移動距離が足らなくなって問題を起こすと;
…ちゃんと考えて作ってよーもう;
おまけにBMGエクストルーダーにV6を直付けしたダイレクトドライブと共有しようとすると、高さの問題で付け替え後のオートホームでベッドとV6が干渉して事故を起こす可能性が出てしまう。
てことで、どうせリミットスイッチの話やこの辺の事故回避するなら、Hemeraの取り付け位置を変更してしまえ!!と新たにブラケット作りました。
V6のノズル位置に合わせたので結構位置が変わるため、PETGでは強度不足になるのを考えて、改めてHTPLAを調達して組みました。
(この部品はBMG+V6の方がすでに印刷できる状態だったので、Xchange取り付けの終わったEnder-3で出しました。やはり別途追加したMOSFETボードが大効果を出していて、一発で綺麗なモデルが出力されました。上手くいかない人はやっぱり追加した方が良いと思います。)
これで確実にベッドの全体を使えるようにやっとなりました。
あとは細かい数字というか、Marlinに必要なプローブオフセット値を入れ、実際にZ Probe Offsetを調整出してから改めて書き入れれば完成というところ。
これで2種類のヘッドが使用可能になりました。
ちなみに電源入れてからヘッド交換すると、3D Touchが起動時のテストをしていない状態になるので点滅してしまいますが、動作的には全く問題なくレベリングしてくれます。
気になる人は使うヘッドを電源投入前に付け替えて、起動後にツールチェンジメニューで変更しましょう。
俺はそうやってます。
しかし今回は作業中に修正が結構必要だった関係で、マウントする部品の出力が必要になってしまい、
ATOMのスタンドアロン化しておいたのが大活躍しました。
これでEnder-3の改造に関しては最後になるでしょう。
ヘッド回りの最新技術が出たりしたらツール追加したりすると思いますが、そのくらい。
(2022/01/08 追記:この記事を書いてすぐに予約販売が開始になりましたが、E3Dの新ノズル「Revo」シリーズが登場しましたので、今後発売され次第ノズル系は置き換えていきます。Hemeraのコンバージョンキットはすでに予約しましたのでそちらにします。V6側もほかにエクストルーダーで都合の良いものが見つかったのでRevo Microと組み合わせて軽量版を新規に起こします。が、記事としては起こしません。ここまで触れる方だとおそらく当たり前の範囲になりますので。)
やっと俺の満足するEnder-3になりました。
あとはいろいろ造形頑張っていただかないとですなw
<2022/01/02 追記>
まだちょっとかかると思いますが、Ender-3をここまで改造する間に一度通ったMicro Swissコピーのオールメタルホットエンドを使った、ストックパーツを組み合わせたツールをデザインしています。
あとはパーツ冷却用のダクトだけなんですけど、形をどうしようか迷っています。
コンセプト的に余り物で組む形ですな。
2021-12-21 17:00
コメント(0)
Marlinのベッドサイズとホームオフセット値の関係。 [Ender-3系]
さて、本日はお時間取れるので書いてすぐ出しちゃいますか。
まだ記事にしていませんが、先に書いておかないといけないかなと思ったので。
10月に届いたPrinterMods.comの「Xchange」ですが、その後組み付けができずに寝かせていまして、やっと今月組み付けを終わらせました。
組み付けの話はまた後日別記事で。
これの動作確認のためにツールチェンジを実際にやってみたところ、問題発生している感じです。
というか、Marlinの仕様に翻弄されているといった方が良いかもしれません。
Marlinのメニューにツール変更を追加するのを以前記事にしていますが、追記で修正すると入れました。
実は「全く間違っていない」のでアレで大丈夫ですが、Marlinの使い方というか3Dプリンターの使い方でヘッドにレーザー刻印機をつけたりできるようになり、メニューの位置をコンフィグより前に出すことができるようになってるので、改めて書くときは新規で記事にします。
で、何が問題になっているかというと「ツール間の構造差による数値を反映させた結果、X軸のMAXがどうしても減少してしまう」という状態を直せないというところ。
通常、Marlinのリミットスイッチを使って原点出しをするときに、スイッチが押されたところを最小にしてそこの座標を「0」にするのかどうかという設定を入れます。
基本は「0」で良いのですが、ツール変更をするとなると切り替えなきゃいけない。
ということでメニューでgcodeの「M206」を使って「ホームオフセット」を入れて対応させるわけですが…
このホームオフセットの値の扱い方がMarlinではエラい癖があるのに気がついちゃった感じです。
結果から言うと、
ベッドサイズで移動範囲を指定した状態でX軸(もしくはY軸)の最小値を設定した場合、
「ベッドサイズの座標系が指定した数値で全体的に移動してしまう」
という感じです。
…余計な計算してるよもう;
Marlinの記述で回避できるコードがないか調べたりしたんですが見つからず、gcodeでなんとかならないか調べても見たんですが現在まだ解決していません。
で、ここからはツールチェンジメニューを入れるときのgcodeで指定した座標系数値の扱いの癖をば。
Configuration.hの各軸の最小値・最大値で基本の機構としての動作範囲がまず置かれます。
これに対して、gcodeで指定して出すM206(ホームオフセット再設定値)やM218(ホットエンドオフセット)の値は「ベッドサイズ指定の数値に加算されて処理される」という状態になります。
つまり、M206で指定してツールヘッドを変更する場合は最初の「最小値」からその分を引いた数字で入力する必要がある(リミットスイッチを最小値として扱う場合)ということです。
この状態でSoftware Endstopが有効になっていると…なんと「リミットスイッチで与える数値を最大値に加算して設定」してしまうのです;
イメージで言うとX軸のみに限定して例を示しますと…
ベッドサイズを235mmで指定して、最小値を「0」とする
→「0~235」でX軸が動作する
↓
ベッドサイズを235mmで指定して、最小値をヘッドの位置に合わせて「-20」とする
→「-20~215」でX軸が動作する
という、全体の動作範囲がスライドする状態になってしまうのです。
アレですな、最近のホビーRCカーの調整項目にある「サブトリム」みたいなお話。
なので、使いたい範囲が外にまだあるのにそこまで行ってくれないのですよ;
地味にこれが困る;
今どうやって回避するか考えていますが、最終的には物理的な処理をする可能性があります。
どうするかというと…「Xchangeの交換プレート側にそれぞれのリミットスイッチ用のあて板を取り付ける」ですね。
これが一番手っ取り早い。
というかXchangeがKickstarterで出たことを紹介するyoutube動画で最初はツールヘッド側にBL Touchをつけず、本体側にリミットスイッチを押すブロックごと印刷して挟み込んでるんですよ。
それに合わせて各種ツールの構成が決まってた感じなので、何でこんなことを?って思ってたんですがどうやらMarlinの仕様のせいじゃないかなと。
これでやるのであれば、Marlinに記述しなくてもモデルで出力させておけば勝手に良い位置に合ってしまうわけで問題ないですし、Cura側も気にして設定別に作る必要もない。
というわけで、とりあえず今どうやって直すかを考えつつという感じです。
0点調整で与える座標値を単純にくっつけるだけで良いのに、なんで範囲ごと動かす計算式入れてしまっているのか、ちょっと理解に苦しむなと思っているところです;
どーにか簡単にできないだろうか…;
<2021/12/18 追記>
対策を考えているうちに、その間印刷ができない状態なのも問題になってしまうので、
BMG+V6のダイレクトマウントの構成変更ついでに、Hemera共々リミットスイッチを押すブロックを個別に作成することにしました。
やはりあのMarlinの処理を見ていると「X_MIN_POS」に数字を入れて修正したくありません;
悩むくらいなら使える方が先、という考え方をとることにします。
まさかのATOMがピンチヒッターで登場という、作っておいて良かった結果が出ました(^^;
ホントどうしようかと思いましたよ;
<2021/12/21 追記>
その後調整を繰り返していて気がついてリミットスイッチの位置以前の問題を確認したので、Hemeraの取り付けブラケットを新設しました。
というのも、Xchangeの専用取り付け穴を使ってEnder-3に取り付ける場合、ノズルの位置の関係でX軸右端でリニアガイドの移動範囲が足りなくなり、210mm付近で移動距離が足りなくなります。
※つまりHmemeraのノズルはEnder-3にXchangeを介して載せた場合、位置が合わないのでgcode以前の問題を起こします。
またXchange組み付けの記事の時に詳細を書きますが、今回はBMGエクストルーダー+V6ホットエンドのダイレクトドライブを基準に使っているので、そちらに合わせたHemera用ブラケットを作成してオフセット搭載としました。
結構つじつま合わせが多いですなぁ;
まだ記事にしていませんが、先に書いておかないといけないかなと思ったので。
10月に届いたPrinterMods.comの「Xchange」ですが、その後組み付けができずに寝かせていまして、やっと今月組み付けを終わらせました。
組み付けの話はまた後日別記事で。
これの動作確認のためにツールチェンジを実際にやってみたところ、問題発生している感じです。
というか、Marlinの仕様に翻弄されているといった方が良いかもしれません。
Marlinのメニューにツール変更を追加するのを以前記事にしていますが、追記で修正すると入れました。
実は「全く間違っていない」のでアレで大丈夫ですが、Marlinの使い方というか3Dプリンターの使い方でヘッドにレーザー刻印機をつけたりできるようになり、メニューの位置をコンフィグより前に出すことができるようになってるので、改めて書くときは新規で記事にします。
で、何が問題になっているかというと「ツール間の構造差による数値を反映させた結果、X軸のMAXがどうしても減少してしまう」という状態を直せないというところ。
通常、Marlinのリミットスイッチを使って原点出しをするときに、スイッチが押されたところを最小にしてそこの座標を「0」にするのかどうかという設定を入れます。
基本は「0」で良いのですが、ツール変更をするとなると切り替えなきゃいけない。
ということでメニューでgcodeの「M206」を使って「ホームオフセット」を入れて対応させるわけですが…
このホームオフセットの値の扱い方がMarlinではエラい癖があるのに気がついちゃった感じです。
結果から言うと、
ベッドサイズで移動範囲を指定した状態でX軸(もしくはY軸)の最小値を設定した場合、
「ベッドサイズの座標系が指定した数値で全体的に移動してしまう」
という感じです。
…余計な計算してるよもう;
Marlinの記述で回避できるコードがないか調べたりしたんですが見つからず、gcodeでなんとかならないか調べても見たんですが現在まだ解決していません。
で、ここからはツールチェンジメニューを入れるときのgcodeで指定した座標系数値の扱いの癖をば。
Configuration.hの各軸の最小値・最大値で基本の機構としての動作範囲がまず置かれます。
これに対して、gcodeで指定して出すM206(ホームオフセット再設定値)やM218(ホットエンドオフセット)の値は「ベッドサイズ指定の数値に加算されて処理される」という状態になります。
つまり、M206で指定してツールヘッドを変更する場合は最初の「最小値」からその分を引いた数字で入力する必要がある(リミットスイッチを最小値として扱う場合)ということです。
この状態でSoftware Endstopが有効になっていると…なんと「リミットスイッチで与える数値を最大値に加算して設定」してしまうのです;
イメージで言うとX軸のみに限定して例を示しますと…
ベッドサイズを235mmで指定して、最小値を「0」とする
→「0~235」でX軸が動作する
↓
ベッドサイズを235mmで指定して、最小値をヘッドの位置に合わせて「-20」とする
→「-20~215」でX軸が動作する
という、全体の動作範囲がスライドする状態になってしまうのです。
アレですな、最近のホビーRCカーの調整項目にある「サブトリム」みたいなお話。
なので、使いたい範囲が外にまだあるのにそこまで行ってくれないのですよ;
地味にこれが困る;
今どうやって回避するか考えていますが、最終的には物理的な処理をする可能性があります。
どうするかというと…「Xchangeの交換プレート側にそれぞれのリミットスイッチ用のあて板を取り付ける」ですね。
これが一番手っ取り早い。
というかXchangeがKickstarterで出たことを紹介するyoutube動画で最初はツールヘッド側にBL Touchをつけず、本体側にリミットスイッチを押すブロックごと印刷して挟み込んでるんですよ。
それに合わせて各種ツールの構成が決まってた感じなので、何でこんなことを?って思ってたんですがどうやらMarlinの仕様のせいじゃないかなと。
これでやるのであれば、Marlinに記述しなくてもモデルで出力させておけば勝手に良い位置に合ってしまうわけで問題ないですし、Cura側も気にして設定別に作る必要もない。
というわけで、とりあえず今どうやって直すかを考えつつという感じです。
0点調整で与える座標値を単純にくっつけるだけで良いのに、なんで範囲ごと動かす計算式入れてしまっているのか、ちょっと理解に苦しむなと思っているところです;
どーにか簡単にできないだろうか…;
<2021/12/18 追記>
対策を考えているうちに、その間印刷ができない状態なのも問題になってしまうので、
BMG+V6のダイレクトマウントの構成変更ついでに、Hemera共々リミットスイッチを押すブロックを個別に作成することにしました。
やはりあのMarlinの処理を見ていると「X_MIN_POS」に数字を入れて修正したくありません;
悩むくらいなら使える方が先、という考え方をとることにします。
まさかのATOMがピンチヒッターで登場という、作っておいて良かった結果が出ました(^^;
ホントどうしようかと思いましたよ;
<2021/12/21 追記>
その後調整を繰り返していて気がついてリミットスイッチの位置以前の問題を確認したので、Hemeraの取り付けブラケットを新設しました。
というのも、Xchangeの専用取り付け穴を使ってEnder-3に取り付ける場合、ノズルの位置の関係でX軸右端でリニアガイドの移動範囲が足りなくなり、210mm付近で移動距離が足りなくなります。
※つまりHmemeraのノズルはEnder-3にXchangeを介して載せた場合、位置が合わないのでgcode以前の問題を起こします。
またXchange組み付けの記事の時に詳細を書きますが、今回はBMGエクストルーダー+V6ホットエンドのダイレクトドライブを基準に使っているので、そちらに合わせたHemera用ブラケットを作成してオフセット搭載としました。
結構つじつま合わせが多いですなぁ;
2021-12-17 09:37
コメント(0)
MOSFETボード [Ender-3系]
都合Ender-3系にカテゴリ置きましたが、このブログではGENKEI ATOMとこの後追加予定のカテゴリすべてで共通なお話ですな。
このところEnder-3を使ってATOMのパーツを出力したりしていた関係でPETGフィラメントがメインになってたんですが、たまに使うPLAやASAなんかの印刷品質を見ていてもう少し良くならないかとずっと考えていて。
海外の3Dプリンター紹介動画を上げている著名な方々のをかなりたくさん見ているんですが、やはりZ方向で言うほど高い精度の出た印刷がRepRap系マシンで出せていないなと言う雰囲気を感じていました。
ランダムででこぼこになっちゃうアレですな。
大小様々ではあるものの、俺が考えているような巷でよくあるサンプルのような綺麗さが出しにくい的な。
(多分いろんなお話が絡むので苦慮されてるんだと思います)
正直なお話、商業用3Dプリンターであれば苦労しないのはわかるんですが、個人で持つには大型自動二輪買えるお話になるので現実的ではないですし、ぶっちゃけそこまでやる必要は個人ではなかったりします。
が…やってると欲が出て品質どうしても上げたくなるんですよね(^^;
なのでいろいろ見ながら試しながらでやってきて、やっぱりメカ的なダメ潰しが終わってても品質がばらつくので何がいけないのかCuraの設定とにらめっこの日々でした。
そしてまだカテゴリ別にしようとして組み立て途中にある3Dプリンターを構成している中、ATOMを練習台にしていろいろ作っていて「はて?」と思うものを発見。
これと同時にyoutubeでホットエンドのフローに関して言及する動画を見て「もしや…」と。
きっかけはBondtechの新ノズル発表です。
ノズル入口側で3分割してフィラメントを熱で切り、今まで届きにくいとされていたフィラメント中心部の温度の下がりを極力減らしてしまおうという商品が出ました。
気になったんで買ってみようと思ったんですが、この構造でフィラメントへの熱伝導率を上げた結果、フロー圧力が低下するためフィラメント交換が容易ではないとのことで、俺みたいにいろいろ材料変える使い方には向かないと思って取りやめました。
そもそも今使っているE3Dの「Nozzle X」があまりにもメンテナンスフリーで使い続けられているので交換考える理由としても弱いのもありました。
となると…Nozzle Xで問題ないんだから熱の与え方はこのままでも良いはずだよね?なのになんでフィラメントの出方がうまく一定にならないのか?と。
そこで見たのが先ほど書いたフローに言及する動画だったんですが(Bondtechの新ノズルの解説のために言及した形のものです)、ここでノズル先端から排出されるフィラメントの流れ方を見ていて気がつく。
あ、これノズル内圧が適正値に収まってないからか、と。
壁がボコボコに層でランダムになってしまうのは圧力が低いときと高いときとで「出力時の細り太りが出る」が原因だなと。
となると、Bondtechの熱を十分にかけて流れやすくするのは一つの回答です。
このやり方を今までのセオリーで調整するなら、いつもの「100mm射出法」でエクストルーダーステップ値に合わせたフロー率でCuraで併せればいけるわけですが、俺がこれで合わせている限りではアンダーエクストルージョンがどうしてもで結局ガサガサが強く出てしまう結果に。
ではこの「100mm射出法」って何を調整するものさ?って根本に帰ってみたんですが、
これって「ギヤ比とモーターの関係から、実際の送り量を合わせてスリップをなくす」ってお話なので、フィラメント交換したら全部マシン側の調整しなきゃいけないわけですよね。
で、これを踏まえた上でセオリーを一旦ひっくり返そうと考えました。ノズルの話と合わせて。
つまり「フィラメントに関係なくいつも送り量が変わらなければ良い」と。
ということは「フィラメントに適切な温度でいつも設定を変えれば100mm出るぞ」という体をなせば良い。
これに対して、新ノズルでは「熱が全体に加わりにくいのを解消しました」と。
てことは、ノズル内圧が上がる→ノズル内部温度が低下して流れが悪いのに対して押し出しが多い、逆のノズル内圧が下がる→ノズル内部温度が高すぎて流れすぎて送りが足りずアンダーを起こす、という両方が行ったり来たりする可能性があるかもしれない。
ここまで考えたところで、必要な部品を発注するために通販見ていて、24V系になったことであまり着目されなくなっていた装備を見つけるわけです。
「Heat Bed用MOSFET基板」
これ、元は12V系が主流だった時に、メインボード側のFETが加熱時の負荷で電力供給が間に合わずに焼損する事例が多発するので、加熱系にこれを取り付けることで別電源で安定させてメインボードを保護するためにできたもの。
(回り込みの関係でモータードライバー側の電力不足でドライバーチップかモーターが異常加熱して壊れる事例もありました。)
…うん?「ま さ か …」となったわけです。
現時点で置き換えボードにしろノーマルボードにしろ、基本的には12V電源でも24V電源でもどちらでも使える仕様にほとんどのメインボードは設計されています。
ということはですよ、最新メインボード上の加熱系統のFETは未だに同じサイズ使ってるはずなんですよね。
そうなってくると、Ender-3のノーマルだとしても各軸のモーター4個分とヒートベッド、ホットエンドのヒーター2本への電力供給が一枚のボードで抱え込まれているわけです。
24Vなんである程度安定はしているのでしょうが…積極的に動くX軸とY軸のモーターの動く電力を考えると、局所的な処理でヒーターへの電力がたまに乱高下起こしていてもおかしくはない。
というわけで、ATOMのテストプリントでヒートベッドをPID制御に切り替えたついでに、加熱系統が動いているときの電源の冷却ファンの動きを注視してみまして。
ホットエンドの温度が若干下がって上がってくるまでの時間、ヒートベッドの温度も同様の状態で確かにすこーしだけ負荷のかかってるような挙動を示すんですね。
そしてそのときに「荒れ」が始まる。
もうこれ確信してしまったので、先回りで試すためにMOSFET基板を2個取り寄せていたので、修正ついでにヒーター系の接続に割り込ませて見たところ、電力は各MOSFETが引っ張るので電源は若干うなりますが、明らかにメインボード側の処理が整ってヒーター系の温度の振れが激減しました。
※MOSFETボードを追加するのにMarlinの記述の変更は一切いりません。
結果、100mm射出で計算して減らしていたCuraでのフロー率を100%に戻した形がベストマッチして品質が大幅に良くなりました。
ATOMでうまくいきすぎたのでこれはもうEnder-3でもやるしかない!ということで追加発注し取り付け。
こちらは今XChange導入前の下準備がすべて終わってMOSFETが乗っかっただけの状態ですが、やはり同様に印刷品質が爆上がりしました。
つまり、大半の印刷品質低下の主原因はノズルの温度計測位置が合っていないのではなく「ヒートブロック自体の温度の乱高下が思っているより極端」だということでしょう。
ぶっちゃけるとノズル先端温度とサーミスタの計測位置が離れていたとしても、それなら印刷設定でオフセットして温度入力すれば良いだけの話なので、荒れるのは計測のせいではない訳ですから。
フィードバック制御系ってそういうもんですしね。
<2021/12/20 補足>
そうだ、この温度がどれだけ離れているか気になって、実際にはかってみたいと思っている方いらっしゃると思うので、計測に関する注意点を。
高温に使える接触温度計があるならそれを使うのが手っ取り早いですが、「非接触温度計」を使う場合は気をつけてください。
一般的に販売されている「非接触温度計」は「計測距離によって計れる範囲が変化」します。
説明書にも書いてありますが、たいていの場合「計測距離○○mmで半径○○mmの面積範囲を計測する」と書いてありますので、よく売っている簡単な非接触温度計の場合3Dプリンターの印刷範囲外からレーザーポインターで狙って位置計測すると、大体その範囲は「ヒートブロック全体」を見ちゃうくらいには大雑把にしか計測できません。
なので、Androidスマホだとちょっと探すの大変かもですが、iPhoneを使っている方などは「オプション扱いになるサーモグラフィーカメラアタッチメント」を使って見てください。
画像拡大した状態で画像の計測したい場所を選ぶとかなり正確な温度が出てくるようになります。
キワモノ装備系なので使うところがほかになかなか出ないとか起きますが、機械いじり全般やられる方なら突然使うこともあるので便利かもしれません。俺持ってないですけど←
<ここまで>
つまり根本の原因を潰さない限り品質向上は見込めない、というのは結果一緒だったと。
現在、MOSFET基板を導入してからの印刷は非常に良好で、見ていてもフィラメントの射出太さが時間によって変化することがなくなっています。
今までRepRapマシンでどうしてもガタガタになって悩んでた方はCuraでの試行錯誤は必要にしろ、一度MOSFETを追加した上でテストを繰り返した方が良いかもしれません。
それくらい導入してから俺は楽になりました。
ほんとに「マジでこんなに違う?;」というレベルです。
フローで減らさないといけないと思い込んだ結果、1層目の定着が悪くてすごく悩んだりしたのも100%に戻せたことで起動して放置でほぼ問題ないという激変っぷりです。
ちなみにMOSFETってなんぞや?って思うでしょうがこれはFET素子の種類でして、電圧与えることでスイッチをON/OFFする素子です。
これを周波数制御で行うことで信号を変換したり、直流を交流に変えたりとかいろいろ使われます。
RCのESCでやるスピードコントロールなんかもこれ。
高周波になると発熱が激しくなるので大型のヒートシンクが必要になります。
この辺の話は電子部品解説の方をご覧くださいませ。(俺にはこれ以上説明できない←)
気になる方は小さい基板のでも良いので3Dプリンター用で追加してみてください。
1k程度で一枚買えます。
あと、つけた後見てて面白いのは、メインボードからの本来加熱に使っていた出力がパルスとして処理されるため、MOSFETボードで電流のON/OFFが基板上のLEDの点滅や点灯で見られるのでちょっとかっこいい状態になりますよw
このところEnder-3を使ってATOMのパーツを出力したりしていた関係でPETGフィラメントがメインになってたんですが、たまに使うPLAやASAなんかの印刷品質を見ていてもう少し良くならないかとずっと考えていて。
海外の3Dプリンター紹介動画を上げている著名な方々のをかなりたくさん見ているんですが、やはりZ方向で言うほど高い精度の出た印刷がRepRap系マシンで出せていないなと言う雰囲気を感じていました。
ランダムででこぼこになっちゃうアレですな。
大小様々ではあるものの、俺が考えているような巷でよくあるサンプルのような綺麗さが出しにくい的な。
(多分いろんなお話が絡むので苦慮されてるんだと思います)
正直なお話、商業用3Dプリンターであれば苦労しないのはわかるんですが、個人で持つには大型自動二輪買えるお話になるので現実的ではないですし、ぶっちゃけそこまでやる必要は個人ではなかったりします。
が…やってると欲が出て品質どうしても上げたくなるんですよね(^^;
なのでいろいろ見ながら試しながらでやってきて、やっぱりメカ的なダメ潰しが終わってても品質がばらつくので何がいけないのかCuraの設定とにらめっこの日々でした。
そしてまだカテゴリ別にしようとして組み立て途中にある3Dプリンターを構成している中、ATOMを練習台にしていろいろ作っていて「はて?」と思うものを発見。
これと同時にyoutubeでホットエンドのフローに関して言及する動画を見て「もしや…」と。
きっかけはBondtechの新ノズル発表です。
ノズル入口側で3分割してフィラメントを熱で切り、今まで届きにくいとされていたフィラメント中心部の温度の下がりを極力減らしてしまおうという商品が出ました。
気になったんで買ってみようと思ったんですが、この構造でフィラメントへの熱伝導率を上げた結果、フロー圧力が低下するためフィラメント交換が容易ではないとのことで、俺みたいにいろいろ材料変える使い方には向かないと思って取りやめました。
そもそも今使っているE3Dの「Nozzle X」があまりにもメンテナンスフリーで使い続けられているので交換考える理由としても弱いのもありました。
となると…Nozzle Xで問題ないんだから熱の与え方はこのままでも良いはずだよね?なのになんでフィラメントの出方がうまく一定にならないのか?と。
そこで見たのが先ほど書いたフローに言及する動画だったんですが(Bondtechの新ノズルの解説のために言及した形のものです)、ここでノズル先端から排出されるフィラメントの流れ方を見ていて気がつく。
あ、これノズル内圧が適正値に収まってないからか、と。
壁がボコボコに層でランダムになってしまうのは圧力が低いときと高いときとで「出力時の細り太りが出る」が原因だなと。
となると、Bondtechの熱を十分にかけて流れやすくするのは一つの回答です。
このやり方を今までのセオリーで調整するなら、いつもの「100mm射出法」でエクストルーダーステップ値に合わせたフロー率でCuraで併せればいけるわけですが、俺がこれで合わせている限りではアンダーエクストルージョンがどうしてもで結局ガサガサが強く出てしまう結果に。
ではこの「100mm射出法」って何を調整するものさ?って根本に帰ってみたんですが、
これって「ギヤ比とモーターの関係から、実際の送り量を合わせてスリップをなくす」ってお話なので、フィラメント交換したら全部マシン側の調整しなきゃいけないわけですよね。
で、これを踏まえた上でセオリーを一旦ひっくり返そうと考えました。ノズルの話と合わせて。
つまり「フィラメントに関係なくいつも送り量が変わらなければ良い」と。
ということは「フィラメントに適切な温度でいつも設定を変えれば100mm出るぞ」という体をなせば良い。
これに対して、新ノズルでは「熱が全体に加わりにくいのを解消しました」と。
てことは、ノズル内圧が上がる→ノズル内部温度が低下して流れが悪いのに対して押し出しが多い、逆のノズル内圧が下がる→ノズル内部温度が高すぎて流れすぎて送りが足りずアンダーを起こす、という両方が行ったり来たりする可能性があるかもしれない。
ここまで考えたところで、必要な部品を発注するために通販見ていて、24V系になったことであまり着目されなくなっていた装備を見つけるわけです。
「Heat Bed用MOSFET基板」
これ、元は12V系が主流だった時に、メインボード側のFETが加熱時の負荷で電力供給が間に合わずに焼損する事例が多発するので、加熱系にこれを取り付けることで別電源で安定させてメインボードを保護するためにできたもの。
(回り込みの関係でモータードライバー側の電力不足でドライバーチップかモーターが異常加熱して壊れる事例もありました。)
…うん?「ま さ か …」となったわけです。
現時点で置き換えボードにしろノーマルボードにしろ、基本的には12V電源でも24V電源でもどちらでも使える仕様にほとんどのメインボードは設計されています。
ということはですよ、最新メインボード上の加熱系統のFETは未だに同じサイズ使ってるはずなんですよね。
そうなってくると、Ender-3のノーマルだとしても各軸のモーター4個分とヒートベッド、ホットエンドのヒーター2本への電力供給が一枚のボードで抱え込まれているわけです。
24Vなんである程度安定はしているのでしょうが…積極的に動くX軸とY軸のモーターの動く電力を考えると、局所的な処理でヒーターへの電力がたまに乱高下起こしていてもおかしくはない。
というわけで、ATOMのテストプリントでヒートベッドをPID制御に切り替えたついでに、加熱系統が動いているときの電源の冷却ファンの動きを注視してみまして。
ホットエンドの温度が若干下がって上がってくるまでの時間、ヒートベッドの温度も同様の状態で確かにすこーしだけ負荷のかかってるような挙動を示すんですね。
そしてそのときに「荒れ」が始まる。
もうこれ確信してしまったので、先回りで試すためにMOSFET基板を2個取り寄せていたので、修正ついでにヒーター系の接続に割り込ませて見たところ、電力は各MOSFETが引っ張るので電源は若干うなりますが、明らかにメインボード側の処理が整ってヒーター系の温度の振れが激減しました。
※MOSFETボードを追加するのにMarlinの記述の変更は一切いりません。
結果、100mm射出で計算して減らしていたCuraでのフロー率を100%に戻した形がベストマッチして品質が大幅に良くなりました。
ATOMでうまくいきすぎたのでこれはもうEnder-3でもやるしかない!ということで追加発注し取り付け。
こちらは今XChange導入前の下準備がすべて終わってMOSFETが乗っかっただけの状態ですが、やはり同様に印刷品質が爆上がりしました。
つまり、大半の印刷品質低下の主原因はノズルの温度計測位置が合っていないのではなく「ヒートブロック自体の温度の乱高下が思っているより極端」だということでしょう。
ぶっちゃけるとノズル先端温度とサーミスタの計測位置が離れていたとしても、それなら印刷設定でオフセットして温度入力すれば良いだけの話なので、荒れるのは計測のせいではない訳ですから。
フィードバック制御系ってそういうもんですしね。
<2021/12/20 補足>
そうだ、この温度がどれだけ離れているか気になって、実際にはかってみたいと思っている方いらっしゃると思うので、計測に関する注意点を。
高温に使える接触温度計があるならそれを使うのが手っ取り早いですが、「非接触温度計」を使う場合は気をつけてください。
一般的に販売されている「非接触温度計」は「計測距離によって計れる範囲が変化」します。
説明書にも書いてありますが、たいていの場合「計測距離○○mmで半径○○mmの面積範囲を計測する」と書いてありますので、よく売っている簡単な非接触温度計の場合3Dプリンターの印刷範囲外からレーザーポインターで狙って位置計測すると、大体その範囲は「ヒートブロック全体」を見ちゃうくらいには大雑把にしか計測できません。
なので、Androidスマホだとちょっと探すの大変かもですが、iPhoneを使っている方などは「オプション扱いになるサーモグラフィーカメラアタッチメント」を使って見てください。
画像拡大した状態で画像の計測したい場所を選ぶとかなり正確な温度が出てくるようになります。
キワモノ装備系なので使うところがほかになかなか出ないとか起きますが、機械いじり全般やられる方なら突然使うこともあるので便利かもしれません。俺持ってないですけど←
<ここまで>
つまり根本の原因を潰さない限り品質向上は見込めない、というのは結果一緒だったと。
現在、MOSFET基板を導入してからの印刷は非常に良好で、見ていてもフィラメントの射出太さが時間によって変化することがなくなっています。
今までRepRapマシンでどうしてもガタガタになって悩んでた方はCuraでの試行錯誤は必要にしろ、一度MOSFETを追加した上でテストを繰り返した方が良いかもしれません。
それくらい導入してから俺は楽になりました。
ほんとに「マジでこんなに違う?;」というレベルです。
フローで減らさないといけないと思い込んだ結果、1層目の定着が悪くてすごく悩んだりしたのも100%に戻せたことで起動して放置でほぼ問題ないという激変っぷりです。
ちなみにMOSFETってなんぞや?って思うでしょうがこれはFET素子の種類でして、電圧与えることでスイッチをON/OFFする素子です。
これを周波数制御で行うことで信号を変換したり、直流を交流に変えたりとかいろいろ使われます。
RCのESCでやるスピードコントロールなんかもこれ。
高周波になると発熱が激しくなるので大型のヒートシンクが必要になります。
この辺の話は電子部品解説の方をご覧くださいませ。(俺にはこれ以上説明できない←)
気になる方は小さい基板のでも良いので3Dプリンター用で追加してみてください。
1k程度で一枚買えます。
あと、つけた後見てて面白いのは、メインボードからの本来加熱に使っていた出力がパルスとして処理されるため、MOSFETボードで電流のON/OFFが基板上のLEDの点滅や点灯で見られるのでちょっとかっこいい状態になりますよw
2021-12-08 17:00
コメント(0)
Xchangeが届いた [Ender-3系]
<2023/01/13 追記>
なんだか残念なことに、この記事で紹介している「PrinterMods.com」社が潰れてしまったようで、
現在サイトが「403 Forbidden」という状態になっています。(ブラウザにウィルスチェック入ってると詐欺サイト表示まで出るようになってしまいました;2023/01/18訂正:その後詐欺サイト表示は出なくなりました。)
昨年末から通販サイトが閉鎖されてたんでリニューアルかな?と思ってたんですがそのまま…(´・ω・`)
Xchangeの方がリニアレールコンバージョンに最初から対応しているので、そこまでやってると難しくなかったんで残念です。
<ここまで>
昨年末に知ってこれは便利だから導入しようとKickstarterで初の出資をしていたXchange、その後無事成立して5月予定でものが届くのを待って気がつけば10月。

やっと届きましたw
(ちなみに商品額が15k程度だったため、国際郵便課税通知書添付扱いになって消費税を後から郵便局窓口で払う対応になりました。受け取り時に確認して支払う対応になりました。)
(2021/10/18訂正:抹消線部ですが、家族が受け取ったときの対応で支払い終えていたのを聞き間違いで未払いと勘違いしてただけでした。基本配達可能な場合は受け取り時に配達員とやりとりするとのことです。)
メーカー側からの情報ある程度まとまってからの通知で割と待たされたバッカーが焦れていましたが、
メーカーが悪いわけじゃなくて今回のコロナ騒ぎで流通が減少した煽りを食らい、原材料のアルミが入手困難だったために遅れた形でした。
いやー俺の押さえたセットで最終ロット(6月以降の予定の方もすべて対応できる状態になりました)になって無事プロジェクトを終わらせられるとのことで、初のKickstarter参加でしたが良い結果になったかな?w
この商品何かと言いますと、Ender-3系のX軸をホットエンド取り付け部で脱着式に変更してヘッドの種類を変えられる装備です。
当然最近よくある3Dプリンターのヘッドにレーザーユニットを付けてレーザー彫刻機にしたりとかもできます。
(俺はレーザーの反射が怖いのでやりませんが←)
何がやりたいかというと、Ender-3の出力で最初はノズル径違いを簡単にやりたかったという話なんですが、
考えた結果、メンテナンス性の向上が主体になるかなと考えてます。
いろいろ用意したり調整したりがあるので後から思いつく内容もあるかな?
そしてこの商品ですが、Kickstarterで無事量産ができる体制が整ったため、今後は定常商品としてPrinterMods.comでキット販売されることが決まりました。
(記事を書いている時点ではまだプレオーダー状態です。Kickstarter出資者への対応が終了後とのこと。)
取り付けに関しては後日また。
ちなみにこの手の商品で他社のものではPEXビルドシートで知られるWHAM BAMの「MUTANT V2」と最近出始めたBIQUの「Hermit Crab」があります。
「Hermit Crab」はCAN通信できる本体用があるので間違って選択しないよう注意。
<2021/11/24 追記>
さて、PrinterMods.comの方でついに先日通常販売が開始になったようで。
俺のキットは実はまだちょっと作業時間とれない状態なのでまだ本体側の組み立てが終わっていません。
(別の記事、ATOM側でお話ししたXchangeとは関係のない追加基盤はすぐにできるのでやってありますが)
ただ、気になって仕方ないのはあるので、とりあえず交換に使うであろうスレーブ側を一個組み立ててみました。

BMGドライブとは違う構成で作ってみたいのと、割と人気のある一体型なので「Hemera」を組んでみました。
これは標準でXchangeが対応するユニットなのでポン付けできます。
ほんとはね…E3Dが次の新型ノズル系の話をしているのでそっちが出たら組みたかったのもあるんですが。
いつ出るかわからないし、後からでも換えられるのでとりあえずはV6コアで組み立て。
BL Touch(俺は3D Touchを使ってます)のマウントや、パーツクーリングダクトはHemera標準ものを出力しておいたものです。
なんかこれだけユニットがしっかりしてるとこんだけで済んじゃいますな。苦労しない。
当然Nozzle-Xなんで先に余ってたメインボード使って280℃で増し締めして完成させてあります。
気になる配線系ですが、割とこれがあんまり悩まない。
唯一気にするところと言えば経路くらいのもんですが、正直写真のように少しルーズでも前にちょっと出てる関係でよけてしまいます。
で、これ組んでて思ったんですが、このユニットで組むってことは配線が本体側で固定になるわけで、おそらくBL Touch系つけるとBL Touch系のみしかプローブは選べないでしょうな。
磁力とかで距離を取るものは基本配線が違いますので。(別コネクタで対応すれば良いって話はあります)
結構良い感じに組めるのがわかったので、手持ちのPETGフィラメントでBMGダイレクトドライブマウント出力してから用意してみようかなと。
おそらく改造点としてはこの辺でやることは終わるので、一度外して使わなくなったものの処分しませんと。
結構量があって邪魔なんですよね;
修理パーツとしても使わないので(既製品で対応できる形が整いました)、あと気にするのはメインボード系くらい。
んでもってちょっと小さく言うと…まだ別の3Dプリンター組んでたりします(ぇ
最初に買うにはちょっと高いし、いきなりそれだと弄らなさすぎていろいろ覚えそうになかったから触らなかった機種をこだわりで作ってるみたいな。
これもまた別でカテゴリ立てて進行ですな。
なんだか残念なことに、この記事で紹介している「PrinterMods.com」社が潰れてしまったようで、
現在サイトが「403 Forbidden」という状態になっています。(
昨年末から通販サイトが閉鎖されてたんでリニューアルかな?と思ってたんですがそのまま…(´・ω・`)
Xchangeの方がリニアレールコンバージョンに最初から対応しているので、そこまでやってると難しくなかったんで残念です。
<ここまで>
昨年末に知ってこれは便利だから導入しようとKickstarterで初の出資をしていたXchange、その後無事成立して5月予定でものが届くのを待って気がつけば10月。

やっと届きましたw
(ちなみに商品額が15k程度だったため、国際郵便課税通知書添付扱いになって
(2021/10/18訂正:抹消線部ですが、家族が受け取ったときの対応で支払い終えていたのを聞き間違いで未払いと勘違いしてただけでした。基本配達可能な場合は受け取り時に配達員とやりとりするとのことです。)
メーカー側からの情報ある程度まとまってからの通知で割と待たされたバッカーが焦れていましたが、
メーカーが悪いわけじゃなくて今回のコロナ騒ぎで流通が減少した煽りを食らい、原材料のアルミが入手困難だったために遅れた形でした。
いやー俺の押さえたセットで最終ロット(6月以降の予定の方もすべて対応できる状態になりました)になって無事プロジェクトを終わらせられるとのことで、初のKickstarter参加でしたが良い結果になったかな?w
この商品何かと言いますと、Ender-3系のX軸をホットエンド取り付け部で脱着式に変更してヘッドの種類を変えられる装備です。
当然最近よくある3Dプリンターのヘッドにレーザーユニットを付けてレーザー彫刻機にしたりとかもできます。
(俺はレーザーの反射が怖いのでやりませんが←)
何がやりたいかというと、Ender-3の出力で最初はノズル径違いを簡単にやりたかったという話なんですが、
考えた結果、メンテナンス性の向上が主体になるかなと考えてます。
いろいろ用意したり調整したりがあるので後から思いつく内容もあるかな?
そしてこの商品ですが、Kickstarterで無事量産ができる体制が整ったため、今後は定常商品としてPrinterMods.comでキット販売されることが決まりました。
(記事を書いている時点ではまだプレオーダー状態です。Kickstarter出資者への対応が終了後とのこと。)
取り付けに関しては後日また。
ちなみにこの手の商品で他社のものではPEXビルドシートで知られるWHAM BAMの「MUTANT V2」と最近出始めたBIQUの「Hermit Crab」があります。
「Hermit Crab」はCAN通信できる本体用があるので間違って選択しないよう注意。
<2021/11/24 追記>
さて、PrinterMods.comの方でついに先日通常販売が開始になったようで。
俺のキットは実はまだちょっと作業時間とれない状態なのでまだ本体側の組み立てが終わっていません。
(別の記事、ATOM側でお話ししたXchangeとは関係のない追加基盤はすぐにできるのでやってありますが)
ただ、気になって仕方ないのはあるので、とりあえず交換に使うであろうスレーブ側を一個組み立ててみました。
BMGドライブとは違う構成で作ってみたいのと、割と人気のある一体型なので「Hemera」を組んでみました。
これは標準でXchangeが対応するユニットなのでポン付けできます。
ほんとはね…E3Dが次の新型ノズル系の話をしているのでそっちが出たら組みたかったのもあるんですが。
いつ出るかわからないし、後からでも換えられるのでとりあえずはV6コアで組み立て。
BL Touch(俺は3D Touchを使ってます)のマウントや、パーツクーリングダクトはHemera標準ものを出力しておいたものです。
なんかこれだけユニットがしっかりしてるとこんだけで済んじゃいますな。苦労しない。
当然Nozzle-Xなんで先に余ってたメインボード使って280℃で増し締めして完成させてあります。
気になる配線系ですが、割とこれがあんまり悩まない。
唯一気にするところと言えば経路くらいのもんですが、正直写真のように少しルーズでも前にちょっと出てる関係でよけてしまいます。
で、これ組んでて思ったんですが、このユニットで組むってことは配線が本体側で固定になるわけで、おそらくBL Touch系つけるとBL Touch系のみしかプローブは選べないでしょうな。
磁力とかで距離を取るものは基本配線が違いますので。(別コネクタで対応すれば良いって話はあります)
結構良い感じに組めるのがわかったので、手持ちのPETGフィラメントでBMGダイレクトドライブマウント出力してから用意してみようかなと。
おそらく改造点としてはこの辺でやることは終わるので、一度外して使わなくなったものの処分しませんと。
結構量があって邪魔なんですよね;
修理パーツとしても使わないので(既製品で対応できる形が整いました)、あと気にするのはメインボード系くらい。
んでもってちょっと小さく言うと…まだ別の3Dプリンター組んでたりします(ぇ
最初に買うにはちょっと高いし、いきなりそれだと弄らなさすぎていろいろ覚えそうになかったから触らなかった機種をこだわりで作ってるみたいな。
これもまた別でカテゴリ立てて進行ですな。
2021-10-16 21:56
コメント(0)
XchangeやMUTANTのようなツールチェンジ用簡易選択メニュー作成(Marlin2.0.9.1で作成) [Ender-3系]
<2021/12/17 追記>
やっとXchangeを組み込めたので、E3D V6ダイレクトドライブとHemeraで設定できるか確認している段階なのですが、
この記事の通りにやると少し数値変更がうまく働かないのかV6基準でConfig記述するとHemeraのX軸範囲がずれてしまいます。
現在もう一度Marlinの記述を確認して正しいメニュー構築をしてうまくいったら追記で修正をいたします。
<ここまで>
さて、思いついてなので今回は直に投下。
Ender-3にホットエンドの簡易交換機構をつけたいと言うことで、ダイレクトエクストルーダーでできるように準備をしているところですが、Kickstarterで入れた商品が昨今のコロナの影響で材料仕入れ遅れでずっと待ってます(
やろうとしていることは単純なツールチェンジなので、ホットエンド変更と同時にフィラメント変更するようなタイプの時は記述が変わりますので、その時はE3Dのツールチェンジャーシステムの解説見てもらった方が良いと思います。
今回は作業前に交換して使うタイプみたいな感じなので、印刷前に単体で交換する時の対応ですな。
Xchangeを使うときは都度Gcode入力で対応するホットエンドの条件を送ってやるのを紹介していましたが、
MUTANTではMarlinのメニューに記述を入れておいて一発選択するパターンを紹介していましたので、そちらを参考に「ダイレクトエクストルーダー」でのツールチェンジメニューを構築してみました。
というわけで、ついでなのでMarlinも2.0.9.1になってたのでそちらで作り直しながら新規でやってみました。
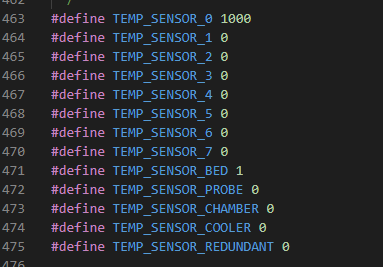
ツールチェンジシステムの面白いところで、ヒートブロックに入れる温度センサーの種類が変わってもすぐに扱えるように、カスタムメニューの中で指定する場合の番号が用意されているので、「Configuration.h」でまずはそちらを設定。
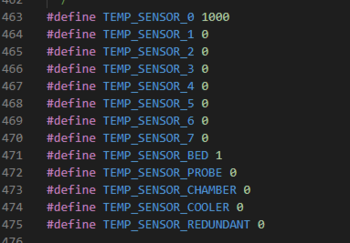
現状で俺のはE3D V6をベースにしたBMGエクストルーダーを使ったダイレクトドライブシステムなので、
純正センサーを使っている関係で本来なら「TEMP_SENSOR_0」の指定は「5」(104GT)になります。
※Ender-3標準の場合は「1」になります。ヒートベッドのと同じのですな。
そこを選択制にするために「1000」(カスタムメニューで指定)に切り替えておきます。
俺の場合は後はBL TouchやDual Z Axis Motorがありますが、この辺は以前やってるのと変わらないので割愛。
(今回の記事では関係ありませんので)
ホットエンド変更なんでヒーターとかPID値とか変わりますが、これはメニュー側に条件で入れてやるので新たに項目へ書き込む必要はありません。
ダイレクトエクストルーダーの場合はEステップ値も関わりますが、これも同様にGcodeで送るので気にしなくて良いです。(いずれもメニューで選んだときに上書きされるため関係ありません)
てなわけで「Configuration.h」はもうこれで終わり(ぇ
次に「Configuration_adh.h」へ。
こちらもカスタムメニューのところを弄るだけです。
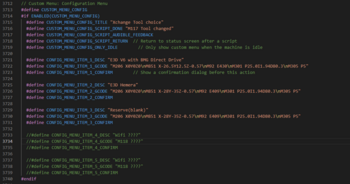
まずはカスタムメニューの有効化のために「#define CUSTOM_MENU_CONFIG」をアンコメントし、
すぐ下の「#define CUSTOM_MENU_CONFIG_TITLE」で自分のわかりやすい名前へ変更。
その下の行で選択後のステータス画面の完了メッセージを設定。
このとき「#define CUSTOM_MENU_CONFIG_SCRIPT_RETURN」をアンコメントすると操作したときに自動でステータス画面に戻ります。
でここからがちょっと調べながらになりましたが解れば簡単。
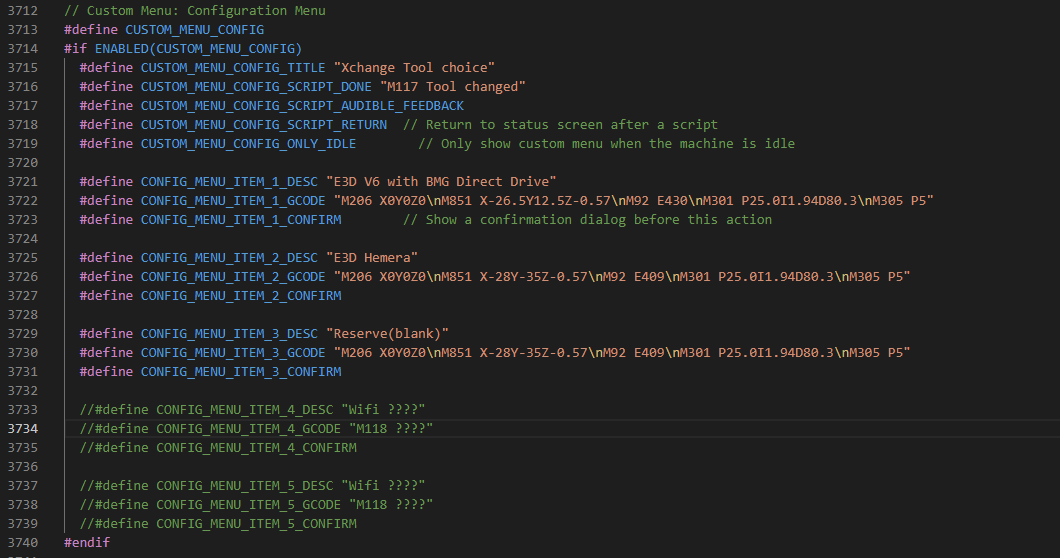
「#define CONFIG_MENU_ITEM_(番号)_DESC」で交換するツールの名称を決めておき表示させます。
俺の例では間違うといけないのでわざと詳しく名前入れましたが「TOOL1」とかでも大丈夫。
「#define CONFIG_MENU_ITEM_(番号)_GCODE」でツールに対応した各種パラメーターをGcodeで本体に送る設定になります。
M206はいわゆる機種の持っているノズル先端位置のオフセット位置ですが、これはおそらくCuraなどで入れて使ってると思われますので、特に気にせずすべて「0」の値で良いです。
で、複数のパラメーターを送るために文節を切らないといけないので「\n」で区切りスペースを入れずに次のコードを入れていく形で必要分書き込んでいきます。
俺の場合は必要になるパラメーターが「BL Touchのプローブオフセット」「エクストルーダーのステップ値」「ノズルのPID値」「ホットエンドの温度センサーの種類」なので上のスクショのようになります。
この辺のGcodeの番号についてはMarlinのサイトに解説があるのでそこで見た方が良いです。
面白いのはここでも使ってる「M305」(温度センサー種類)なんですが、今回は登録テーブルにあるので「P」で指定して番号打ち込んでますが、ない場合は特性値を入れて対応させることができます。
そちらで使う場合は温度センサーの仕様書から数字拾って各種入れてください。
(ヒーターの特性入れたりすることもできます。)
あとはこれを必要分作れば終わり。
※今回はまだハード的に組み立て作業していないので2つ目からのPID値がでたらめです。
つまり、現状で書き込みましたが、BMGエクストルーダーのダイレクトドライブ設定を選択して保存した形にして使っています。
これで後はファームウェアをボードに書き込めば、Marlinのメニューの「Advanced Settings」からカスタムメニューが表示されるはずです。
で、笑っちゃう話なんですが、ここまで慣れていろいろ弄るようになった結果、ケアレスミスしてビルドが通らずに一回バニラから作り直すという無駄な作業が←
※何をやったかというと、ボード指定の記述で「MOTHERBOARD_」を誤って入れ忘れ「しらんボードしていするなや」というエラーを連発したのであります←
そこだけ直したら一発で通ったw
あとちょっと気がついたんですが、Marlin2.0.9でアクセラレーションをバニラのまま使っていたらSカーブ指定したのに角やモールドの付近にゴーストが出ちゃったんで数字変えなきゃと思ってたんですが、Marlin2.0.9.1で見たら数値が半分に直されてました。
やはり影響強かったんで直したんでしょうね。
(実はここの記述、バージョンごとに変わってること多いです。倍になったり半分になったり繰り返してます)
印刷クオリティが突然おかしくなったなと思ったらこの辺見てみても良いかもですな。
この場所はMarlinのメニューにも最初からでるはずなので、もし速すぎが出たらそこで直しても良いかもです。
てな感じで、ATOMの方は実は組み上がってて、電源スイッチや電源ケーブルの部品待ちで最終調整待ってる感じの3Dプリンターいじり近況でしたw
やっとXchangeを組み込めたので、E3D V6ダイレクトドライブとHemeraで設定できるか確認している段階なのですが、
この記事の通りにやると少し数値変更がうまく働かないのかV6基準でConfig記述するとHemeraのX軸範囲がずれてしまいます。
現在もう一度Marlinの記述を確認して正しいメニュー構築をしてうまくいったら追記で修正をいたします。
<ここまで>
さて、思いついてなので今回は直に投下。
Ender-3にホットエンドの簡易交換機構をつけたいと言うことで、ダイレクトエクストルーダーでできるように準備をしているところですが、Kickstarterで入れた商品が昨今のコロナの影響で材料仕入れ遅れでずっと待ってます(
やろうとしていることは単純なツールチェンジなので、ホットエンド変更と同時にフィラメント変更するようなタイプの時は記述が変わりますので、その時はE3Dのツールチェンジャーシステムの解説見てもらった方が良いと思います。
今回は作業前に交換して使うタイプみたいな感じなので、印刷前に単体で交換する時の対応ですな。
Xchangeを使うときは都度Gcode入力で対応するホットエンドの条件を送ってやるのを紹介していましたが、
MUTANTではMarlinのメニューに記述を入れておいて一発選択するパターンを紹介していましたので、そちらを参考に「ダイレクトエクストルーダー」でのツールチェンジメニューを構築してみました。
というわけで、ついでなのでMarlinも2.0.9.1になってたのでそちらで作り直しながら新規でやってみました。
ツールチェンジシステムの面白いところで、ヒートブロックに入れる温度センサーの種類が変わってもすぐに扱えるように、カスタムメニューの中で指定する場合の番号が用意されているので、「Configuration.h」でまずはそちらを設定。
現状で俺のはE3D V6をベースにしたBMGエクストルーダーを使ったダイレクトドライブシステムなので、
純正センサーを使っている関係で本来なら「TEMP_SENSOR_0」の指定は「5」(104GT)になります。
※Ender-3標準の場合は「1」になります。ヒートベッドのと同じのですな。
そこを選択制にするために「1000」(カスタムメニューで指定)に切り替えておきます。
俺の場合は後はBL TouchやDual Z Axis Motorがありますが、この辺は以前やってるのと変わらないので割愛。
(今回の記事では関係ありませんので)
ホットエンド変更なんでヒーターとかPID値とか変わりますが、これはメニュー側に条件で入れてやるので新たに項目へ書き込む必要はありません。
ダイレクトエクストルーダーの場合はEステップ値も関わりますが、これも同様にGcodeで送るので気にしなくて良いです。(いずれもメニューで選んだときに上書きされるため関係ありません)
てなわけで「Configuration.h」はもうこれで終わり(ぇ
次に「Configuration_adh.h」へ。
こちらもカスタムメニューのところを弄るだけです。
まずはカスタムメニューの有効化のために「#define CUSTOM_MENU_CONFIG」をアンコメントし、
すぐ下の「#define CUSTOM_MENU_CONFIG_TITLE」で自分のわかりやすい名前へ変更。
その下の行で選択後のステータス画面の完了メッセージを設定。
このとき「#define CUSTOM_MENU_CONFIG_SCRIPT_RETURN」をアンコメントすると操作したときに自動でステータス画面に戻ります。
でここからがちょっと調べながらになりましたが解れば簡単。
「#define CONFIG_MENU_ITEM_(番号)_DESC」で交換するツールの名称を決めておき表示させます。
俺の例では間違うといけないのでわざと詳しく名前入れましたが「TOOL1」とかでも大丈夫。
「#define CONFIG_MENU_ITEM_(番号)_GCODE」でツールに対応した各種パラメーターをGcodeで本体に送る設定になります。
M206はいわゆる機種の持っているノズル先端位置のオフセット位置ですが、これはおそらくCuraなどで入れて使ってると思われますので、特に気にせずすべて「0」の値で良いです。
で、複数のパラメーターを送るために文節を切らないといけないので「\n」で区切りスペースを入れずに次のコードを入れていく形で必要分書き込んでいきます。
俺の場合は必要になるパラメーターが「BL Touchのプローブオフセット」「エクストルーダーのステップ値」「ノズルのPID値」「ホットエンドの温度センサーの種類」なので上のスクショのようになります。
この辺のGcodeの番号についてはMarlinのサイトに解説があるのでそこで見た方が良いです。
面白いのはここでも使ってる「M305」(温度センサー種類)なんですが、今回は登録テーブルにあるので「P」で指定して番号打ち込んでますが、ない場合は特性値を入れて対応させることができます。
そちらで使う場合は温度センサーの仕様書から数字拾って各種入れてください。
(ヒーターの特性入れたりすることもできます。)
あとはこれを必要分作れば終わり。
※今回はまだハード的に組み立て作業していないので2つ目からのPID値がでたらめです。
つまり、現状で書き込みましたが、BMGエクストルーダーのダイレクトドライブ設定を選択して保存した形にして使っています。
これで後はファームウェアをボードに書き込めば、Marlinのメニューの「Advanced Settings」からカスタムメニューが表示されるはずです。
で、笑っちゃう話なんですが、ここまで慣れていろいろ弄るようになった結果、ケアレスミスしてビルドが通らずに一回バニラから作り直すという無駄な作業が←
※何をやったかというと、ボード指定の記述で「MOTHERBOARD_」を誤って入れ忘れ「しらんボードしていするなや」というエラーを連発したのであります←
そこだけ直したら一発で通ったw
あとちょっと気がついたんですが、Marlin2.0.9でアクセラレーションをバニラのまま使っていたらSカーブ指定したのに角やモールドの付近にゴーストが出ちゃったんで数字変えなきゃと思ってたんですが、Marlin2.0.9.1で見たら数値が半分に直されてました。
やはり影響強かったんで直したんでしょうね。
(実はここの記述、バージョンごとに変わってること多いです。倍になったり半分になったり繰り返してます)
印刷クオリティが突然おかしくなったなと思ったらこの辺見てみても良いかもですな。
この場所はMarlinのメニューにも最初からでるはずなので、もし速すぎが出たらそこで直しても良いかもです。
てな感じで、ATOMの方は実は組み上がってて、電源スイッチや電源ケーブルの部品待ちで最終調整待ってる感じの3Dプリンターいじり近況でしたw
2021-09-14 19:19
コメント(0)


PSO2_02
